
|
|
|
Главная Микропроцессорные системы [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [ 67 ] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] триггер запроса захвата (Та), адресный счетчик, схема «И», вырабатывающая управляющий сигнал записи для ОЗУ. Работа схемы происходит следующим образом. Импульсный сигнал с выхода стробирующего устройства поступает на АЦП и одновременно устанавливает триггер Гз в единичное состояние, соответствующее сигналу Cfnpof 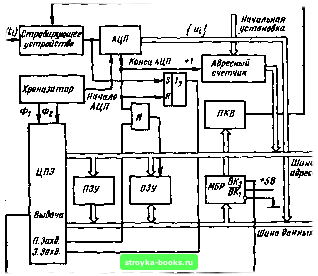 Рис. 5.13. Структурная схема следящего измерителя с амплитудной обработкой сигнала «Запрос захвата». По этому сигналу ЦПЭ останавливает вычисления по основной программе и переводит шины данных, адреса и управления в состояние высокого выходного сопротивления, предоставляя тем самым возможность внешним схемам управлять состоянием этих шин. При этом на выходе ЦПЭ появляется сигнал «Подтверждение захвата», который свидетельствует об окончании переходных процессов в МП и разрешает пользование каналом ПДП. По сигналу конца преобразования с выхода АЦП (который фиксирует окончание операции преобразования амплитуды принятого импуль- са в двоичное число) происходит запись числа из буфера АЦП через шину данных в ОЗУ по адресу, указываемому адресным счетчиком, подключенным к шине адреса. После этого триггер Тз сбрасывается в нулевое состояние, а состояние адресного счетчика увеличивается на 1, и ЦПЭ переходит к продолжению вычислений по основной программе. Такая процедура повторяется каждый раз, когда приходит импульс с выхода стробирую-щего устройства. Следует заметить, что в данном случае возможен другой вариант организации канала ПДП, когда в промежутках между сигнальными импульсами МП не осуществляет вычислений по основной программе, а находится в состоянии «Захват». В этом случае триггер Тз должен устанавливаться в 1 началом следящего строба и сбрасывается в О концом строба. Однако это сопровождается бесполезной тратой времени в промежутках между импульсами, т. е. практически на всем протяжении строба. Такой режим целесообразен в случае приема непрерывных (а не импульсных) сигналов при малом периоде временной дискретизации, т. е. при высокой частоте обращения к АЦП. После выяснения структурных особенностей рассматриваемой системы можно перейти к этапу детализации программного алгоритма, в ходе которого производится уточнение необходимых вычислительных затрат. Однако этот этап здесь опускается (в силу отсутствия явно вы раженной специфики), и предметом дальнейшего рассмотрения служит этап корректировки, выявляющий возможности радикального сокращения вычислительных затрат. 5.3.3. этап корректировки Потребность в корректировке рассмотренного алгоритма может возникнуть, например, при необходимости увеличения объема п обрабатываемого массива {иг, i=[0, п]} или уменьшения периода Т поступления сигнала. Поэтому целесообразно остановиться на возможностях упрощения программного алгоритма, направленных на уменьшение времени вычислений. По аналогии с известными методами упрощения подобных алгоритмов при аппаратной их реализации следует обратиться, прежде всего, к методам бинарного квантования данных. Здесь возможны следующие варианты. 1) Бинарное квантование входных данных, т. е. использование вместо (5.9) статистики ,(1) V l 1. если u.Uo, j=o I о, если Ui < ы„. 2) Бинарное квантование весовых коэффициентов, т. ё. использование статистики I, если 60, - 1, если;Ь<0. 3) Бинарное квантование входных данных и весовых коэффициентов, т. е. использование статистики Во всех трех слзчаях упрощение программного алгоритма достигается благодаря замене операций умножения операциями логической проверки и сложения - вычитания, так как один или оба сомножителя во всех произведениях становятся равными О, +1 или -1. Наибольшей простотой обладает последний (третий) алгоритм формирования статистики dj, однако в нем утрачена возможность дальнейшей интерполяции измерений, так как в окрестности грубой оценки /* функция меняет свое значение с d*i=-1 на d*/+i=--I. Следовательно, вычисления по интерполяционной формуле (5.8) всегда дают один и тот же тривиальный результат =А,(/*-Ы/2). Первые два алгоритма требуют примерно одинаковых вычислительных затрат, поэтому определяющую роль при сравнении этих алгоритмов играют аппаратурные затраты, связанные с реализацией ЗУ (для хранения коэффициентов bk в первом случае и t,k во втором случае) и АЦП (для многоуровневого квантования сигналов щ во втором случае и бинарного квантования в первом случае). Выбор того или иного варианта зависит в каждом конкретном случае от имеющейся элементной базы и заданных технических характеристик микропроцессорной системы. Здесь же основным вопросом является оценка выигрыша в вычислительных затратах, 206 [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [ 67 ] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] 0.001 |