
|
|
|
Главная Микропроцессорные системы [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [ 37 ] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] Начало н.и измеряемого интервала задается хрони-затором, который формирует также необходимые импульсные последовательности, обеспечивающие работу всех узлов системы. В общем случае момент ts-a может изменяться под действием управляющего сигнала бн.и, вырабатываемого программным путем. Принцип построения такого управляемого хронизатора рассматривается в § 4.4. Временное положение строба относительно момента /н.и задается схемой задержки. Первоначально управление этой схемой осуществляется от обнаружителя, который в результате выполнения операций поиска-, и обнаружения сигнала определяет момент прихода полезного сигнала с точностью до интервала разрешения До. Управление от обнаружителя может выполняться либо путем непосредственного взаимодействия обнаружителя со схемой задержки в момент обнаружения сигнала <к.и, либо путем передачи в вычислитель числового кода ко, определяющего номер дискрета, в котором зафиксирован факт наличия сигнала. В последнем случае начальное управление схемой задержки осуществляется так же, как и в режиме измерения,- по шине связи с вычислительным устройством. По этой шине на схему задержки поступает предполагаемое экстраполированное значение временного интервала тэ, определяющее положение строба на предстоящем шаге измерения. В процессе измерения величина тэ рассчитывается программно, а начальное значение тэо определяется как тэо=оДо. Длительность стробирующего импульса тст задается схемой формирования стробов, которая также допускает управление от вычислительного устройства. В простейшем случае величина тст не меняется в процессе измерения, и соответствующая связь отсутствует. Окончательная операция селекции полезного сигнала осуществляется дискриминатором, измеряющим отклонение е характерной точки сигнала относительно экстраполированного значения тэ, выработанного вычислителем на предыдущем шаге измерения. Вместо е дискриминатор может измерять величину =в4-Тст/2, что в ряде случаев.оказывается предпочтительным сточки зрения практической реализации, так как значения не меняют знака (т. е. 0тст), в то время как -Тгт/2етст/2). При этом постоянная поправка Тст/2 может быть учтена программно в процессе обра-114 ботки данных вычислительным устройством. В случае, аппаратной реализации операция дискриминирования завершается выработкой цифрового кода, соответствующего измеренному значению е или , и вводом этого j Управление I началом отсчета 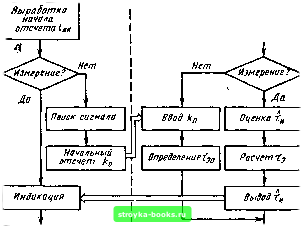 Преобразование кода винтервапХд Преадразование кода В интерВалХи ПреадрозоВоние интервала Сили в кпВ Аппаратная часть
, I Управление \ -----1---------1 дпительностьнл tmpoSa ( Ввод £ или I -Г- Программная часть Рис. 4.3. Взаимодействие аппаратной н программной частей в микропроцессорном следящем измерителе кода в вычислитель. Полученные данные используются в качестве исходной информации для программной реализации выбранного измерительного алгоритма - фильтрации, сглаживания, экстраполяции и т. п. В процессе выполнения этого алгоритма помимо окончательного результата - оценки измеряемого параметра х - долж-8* П5 «ы вырабатываться значения тэ, управляющие схемой задержки на каждом шаге измерения. Последовательность рассмотренных аппаратных операций во взаимодействии с программой, выполняемой вычислителем, показана в виде схемы на рис. 4.3. Вообще любая из операций, отнесенных здесь к аппаратной части микропроцессорной системы, может выполняться программными средствами, однако при этом требуемые вычислительные затраты могут оказаться неприемлемыми. Поэтому на практике часто оказывается целесообразным выполнение ряда операций с помощью аппарат-мых средств, особенно если требуемые для этого аппаратурные затраты невелики. В связи с этим целесообразно остановиться на каждом из узлов, представленных на рис. 4.2, и рассмотреть принципы их построения и структурные схемы, тем более, что по функциональному назначению эти узлы имеют довольно широкую сферу применения и могут, в принципе, рассматриваться как унифицированные узлы, выполняемые в виде специализированных интегральных микросхем. Подобные микросхемы могут входить в состав МПК как самостоятельные элементы или как составные части более сложных БИС. 4.2. УСТРОЙСТВА ПОИСКА И ОБНАРУЖЕНИЯ Конечной целью операции поиска и обнаружения сигнала является сужение анализируемого в ходе измерений временного интервала, что позволяет избежать дополнительных вычислительных затрат, связанных с устранением аномальных ошибок измерения при действии помех. Это достигается путем статистической обработки совокупности принятых за время наблюдения данных на всем априорном временном интервале. В результате такой обработки вырабатывается решение •о наличии (или об отсутствии) информационного сигнала на априорном интервале, и в случае обнаружения сигнала осуществляется предварительная (ориентировочная) фиксация времени его прихода. В измерительных системах обе эти операции неотделимы друг от друга и выполняются единым устройством поиска и обнаружения в процессе обработки принимаемых данных. Поэтому для краткости это устройство далее называется обнаружителем, который наряду с задачей обнару- [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [ 37 ] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] 0.0013 |
|||||||||