
|
|
|
Главная Система автоматического управления [0] [1] [2] [3] [4] [5] [ 6 ] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] (1 -ai/Ce) /Ci = -(1 + В) /Со: Л (1+Д)/Со „ ВКо at/Co • «°°Т~ f = > - а (АР + PQ - Bi-) /С„. о "Г a/i (Р - ер + Q2) • • • • (1.28.) Передаточную функцию цифрового регулятора определим по формуле (1.23), в которой с учетом выражений (1.3), (1.27) и (1.28) коэффициенты имеяют вид о - ah (1 - В) = «2(2/i+) = B; В = е-; ах = "а-СА") == 1 - aL/Co 2 -6А 02 = «J2A+)=F = 26А (1 - В) • 1 -(бА+ 1 + -6=Aaj В (1 В) • (1.29) Оптимальный цифровой регулятор при единичном ступенчатом воздействии иа входе системы формирует следующие управляющие воздействия на входе объекта регулирования: т„ == Ы2 (О) = = /Со; "i = "2 () = io; яа = И2 (2А+) = ЬКо Переходные процессы в интервале 0<:<<;А, t = T определяются вектором T(T) = [wi; xi; к; Xg-, щ]=11: аЦхЖь: аР (т)/С„; где L(T) = aQ(T)/Co: 1]. тЗ-бт-Ь 1-В(т) 1 (1.30) -Ь в (т)]; Q (т) = -g- [1 - В (т)1; В (т) = е Переходные процессы в интервале А*<<2А; 0*<!т<А; / = T-f-A, определяются вектором а/Со [i + + <2Р () - (1 + В) L (т)1 да(т)= a/C„[P + (2Q(T)-(l-f В)Р(т)1 . (1.31) a/Co[QB(T)-(l-bB)Q(T)] 1 - aLKo Наконец, переходные процессы в интервале 21"* <; < < ЗА, 0*<т<А. t - X -\- 2h, определяются вектором а/Со [hP + PQ-BL + x(Q-BP)~QP (,x)+BL (т)] V (т) = а/Со [Q -BP-QQ (т) -Ь BP (т)] a/Co[BQ(T)-QB(T)] l-a/Co(AP+PQ-Bi) (1.32) Пусть объект регулирования имеет параметры а = 10 с=; 6 = 2 с"*. Определим передаточную функцию оптимального цифрового регулятора при шаге квантования Л = 0,1 с по формулам (1.23), (1.29) W [Z)- iw,M J o,82495z-i + 0,158392-2 • Переходные процессы при единичном ступенчатом воздействии и нулевых начальных условиях в системе иа рис. 1.1, а 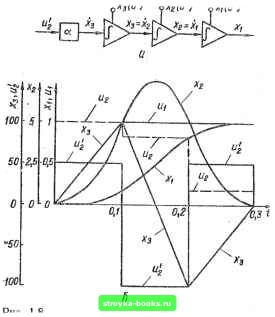 -с указанным объектом регулирования и оптимальным цифровым регулятором, рассчитанные по формулам (1.30) - (1.32), показаны на рис. 1.7, б. Более просто можно определить передаточную функцию W (г) цифрового регулятора для системы на рис. 1.1, с, имеющей объект регулирования третьего порядка с передаточной функцией G (s) = a/s. Схема аналогового моделирования для такого объекта изображена на рис. 1.8, а. Запишем передаточную функцию цифрового регулятора по формуле (1.23), в ксггорой Ко = 1/(аА«); Ki~ 12/5/Со; 2 = б/Со; «2 (О*) = 1: = «а (/г+) = 1 -g- /Со = 5/6; = (2/г+) = 1 - Ко+ahKo+(i - "Г f<c} т- 4 = «a(ft) = -2} 6a = ;«2(2ft*)=i. Переходные процессы в интервале 0" < ? < Л, = т, определяются вектором ф1(т) = [«1; xi, х; X,; и] = [\; тт); т=У(2/г*): т/А; 1]. Переходные процессы в интервале h*t<:2h, 0+<:т<:Л, t - X -\-h, определяются вектором (т) = [1; 1/6 + т/(2А) + т=/(27г«) -xV{3h); 1/(2А) + + т/А2 т=/АЗ; 1/А= -2Т/ЛЗ; 5/6]. Переходные процессы в интервале 2А<:<<3/г, = т + 2А, 0*<:т<Л, определяются вектором •»(T)=[1; 5/6-1-t/(2A)~t=/(2A) + tV(6/iS); l/(2ft)-т/А=+ + T/(2ftS); -1/A2 + t/AS; 1/6]. ФггГо*; oXi(OV о - о 0о
-гоо у00. Рис. 1.9 Переходные процессы в системе (см. рис. 1.1, с) при ~ 20 с~*, h = 0,1 с изображены на рис. 1.8, б. Рассмотрим систему (см. рис. 1.1, с), в которой математическая модель объекта регулирования описывается передаточной функцией С (s) = а [s (s -- 6s + а)\~. Схема аналогового моделирования для такого объекта изображена на рис. 1.9, о. Запишем дифференциальные уравнения состояния для системы на [0] [1] [2] [3] [4] [5] [ 6 ] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] 0.0016 |
||||||||||||||||||||||||||||||||||||||||||||||||||