
|
|
|
Главная Система автоматического управления [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [ 58 ] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] Схема алгоритма расчета параметротэ регулятора для систем управления с передаточной функцией объекта G (s) = а [s (s + + b)] 1 и двумя нелинейностями типа «насыщение» (рис. 2.29 и 2.32) показана на рнс. 2.33 [27]. Блок 1 вводит исходные данные: параметры объекта регулирования а, Ь, U; уровень ограничения НЭ устройства сравнения оу; минимальный шаг квантования fto! максимальное входное ступенчатое воздействие U. Блок 2 рассчитывает предельный шаг квантования А* и предельное t/p при заданных параметрах объекта регулирования и величине hg. Блок 3 сравнивает рассчитанную величину Uq с ©огр- Р* ®огр о управление передается блоку 12 (это соответствует случаю, когда нелинейностью на выходе устройства сравнения можно пренебречь), в противном случае - блоку 4. В блоках 4-8 производится поиск максимального шага квантования h - khg (k - целое число), при котором линейная зона U(, не превышает ©огр- Блок 9 рассчитывает параметры регуля- • тора Ко, Ко, So, So, Ug как функции аргумента h. В блоке 10 выполняется расчет максимальной скорости объекта регулирования при переключении и граничного входного.воздействия тах- Входное воздействие U сравнивается с рассчитанным i/jax блоке и. Если Ujnax-тах ™ управление передается блоку 12 (©орр можно пренебречь), в противном случае - блоку 20, в котором рассчитываются время разгона to и напряжение управления t/ynp- Далее управление передается блоку 21. В блоке 12 в качестве t/ynp принимается значение U и задается начальный шаг дискретизации h. В блоке 13 значение h увеличивается на ho и для лолученного А блок 14 рассчитывает параметры регулятора Ко, Кд, So, Sg, Uo- Рассчитанная линейная зона Ug и максимальное входное воздействие Uсравниваются в блоке 15. Если Uo> fmax управление передается блоку 19 (это соответствует работе регулятора в линейном режиме), где to и Oojjjgj, принимаются равными нулю, а Uo - tmax " управление передается блоку 21. , В противном случае управление передается блоку 16, который рассчитывает время разгона to и скорость объекта при переключении Oojjjax- Блоки 17 и 18 проверяют условия по ограничению Отах- -Р* невыполнении хотя бы одного из условий управление передается блоку 13 для повторного расчета параметров регулятора при увеличенном на ко шаге регулирования h. При совместном выполнении условий управление передается блоку 21, где для найденных значений U„ и Oomax Рассчитываются управляющие воздействия на выходе регулятора щ и т. Блок 22 выводит рассчитанные пгфаметры регулятора и выходные сигналы при заданном входном воздействии U. Рассчитаем по алгоритму на рис. 2.33 переходные процессы в системе рис. 2.32, а при следующих параметрах объекта регулирования и = 10 с~2, 6=2 с~1, 1/огр - О, минимальном (основном) шаге квантования и в дискретном регуляторе kg - = 0,01 с, уровне ограничения в устройстве сравнения = 2 Va 7 У"224 177 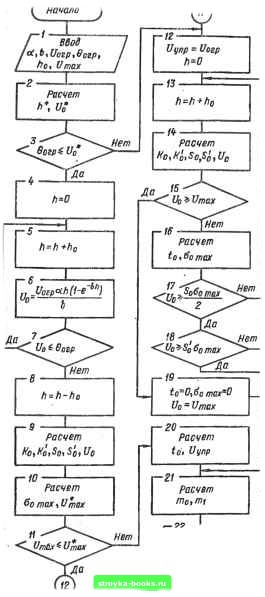 Вывод рассчитанных параметров нонец J Рис. 2.33 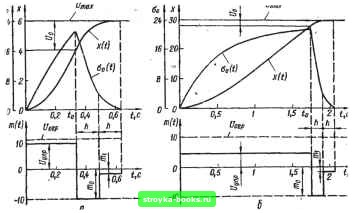 Рис. 2.34  Устройство сравнения Цирровой j.gfi WHcamop fl регулятор Фиксатор <2>- нэ -/fe/j-IX T(s) - Hfs) ОБгект регулирования нэз - фиксатор j2h T(s) -ПП-И- 6o(t) Рис. 2.35 [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [ 58 ] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] 0.0011 |