
|
|
|
Главная Цепи и сигналы [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [ 101 ] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] [137] [138] [139] [140] [141] [142] [143] [144] [145] [146] [147] [148] [149] [150] [151] [152] [153] [154] [155] [156] [157] [158] [159] [160] [161] [162] [163] [164] [165] [166] [167] [168] [169] Глава 10. ЦЕПИ С ПЕРЕМЕННЫМИ ПАРАМЕТРАМИ 10.1. ОБЩИЕ ХАРАКТЕРИСТИКИ ЦЕПЕЙ С ПЕРЕМЕННЫМИ ПАРАМЕТРАМИ Электрические цепи, в которых хотя бы один из параметров изменяется по какому-либо заданному закону, называются параметрическими. Предполагается, что изменение (модуляция) параметра или параметров осуществляется электронным способом при помощи управляющего колебания. Приведем простые примеры электронных способов вариации параметров цепи. Рассмотрим зависимость крутизны вольт-амперной характеристики активного элемента i (и) от управляющего колебания е„ (t), наложенного на постоянное напряжение Eg (см. рис. 10.1, а). Эту зависимость .можно записать в виде S(e,)=(] . (10.1) Выражение (10.1) определяет дифференциальную крутизну характеристики в точке Eg + бу. Если в пределах изменения характеристику можно аппроксимировать полиномом второй степени ( (Eg) -[- fli (и- Eg) -I- «2 {и -Egf, (fli > О, из > 0), го выражение (10.1) приводится к виду S (бу) = а, -f 2а., eSg 4 2а. е, (10.2) где So = fli - дифференциальная крутизна в точке А (рис. 10.1, а). Зависимость крутизны от управляющего напряжения изображена на рис. 10.1, а в виде наклонной прямой линии. Пусть ву ~ Еу cos iOyt. Тогда крутизну можно записать в виде функции времени S (О = 0,-1- 2а2 Еу cos соу i = а, /1 -f Еу cos Ыу t) ~ = S„(1 fmcosojy/), (10.3) где т = 2а2Еу1ах - глубина «модуляции» параметра S. Соответствующим выбором Eg и Еу можно обеспечить условие m < 1. По отношению к слабому сигналу (t), наложенному на управляющее напряжение ву (t), рассматриваемое устройство можно трактовать как линейное с переменным параметром S (t), управляемым по закону (10.3). Существенной особенностью дифференциальной крутизны (а также дифференциального сопротивления) является то, что этот параметр может принимать отрицательное значение. Для этого нужно, чтобы вольт-амперная характеристика на некотором участке имела отрицательный наклон (окрестность точки В на рис. 10.1, а. Аналогично можно истолковать принцип электронного управления емкостью. Пусть к нелинейной емкости приложены два колебания: сильное, которое назовем управляющим, и слабое - сигнальное. Воспользуемся аппроксимацией вольт-кулонной характеристики нелинейного конденсатора полиномом второй степени, как это было сделано в § 8.1 и 8.15: q -= qg + by {и - Eg) + b [и -Eg)\ 6, > О, 2 > 0. 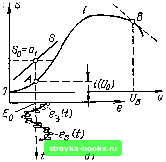 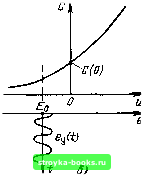 Рис. 10.1. Электронное управление крутизной вольт-амперной характеристики резистивного активного элемента (а) и вольт-фарадной характеристики варикапа (б) Тогда дифференциальную емкость по аналогии с (10.2) можно определить выражением и = Е„ + е где bl = Сд - дифференциальная емкость в точке и = Eg [см. (8.4)1, а \ dq \ dC 2! du и=Е 2! du Если управляющее напряжение является гармоническим колебанием = Еу cos Wy, то можно написать С (t) = Со (1 + m cos oit), (10.4) где т = 22 E/bi - глубина модуляции емкости. После такого преобразования можно говорить о воздействии одного лишь сигнала Cg (t) на периодически изменяющуюся во времени линейную емкость С (t), так как влияние управляющего колебания учтено заменой нелинейной емкости линейной параметрической емкостью. При использовании в качестве управляемого элемента барьерной емкости /7 - п-перехода можно исходить из вольт-фарадной характеристики, представленной на рис. 10.1, б. При и < О эта характеристика хорошо аппроксимируется формулой С(«) = С(0) Уч>Л\и\ + Ц>), (10.5) где ф„ > О - контактная разность потенциалов, зависящая от кристалла, примесей и т. д.; и - внешнее (обратное) напряжение. Подставляя в (10.5)w = \Ео -\-Еу cos i (при Еу< \Ео\), получаем C(t)=C{0) <Рк Фк + I £ol + L> COS (Oyt = C(0) V Фн + £о1 cos My t Прн £у/(ф„ + £о1)-С 1 последнее выражение можно записать в форме C(t)-----, (10.5) Еу I -j-m cos Шу / 1 + --г- cos Шу I где Со = С (0)1/ф„/(фк + \Ео\) -дифференциальная емкость в точке и = = Eg-, т = £у/2 (ф„ + ]Ео\) - глубина модуляции емкости. При т < 1 выражение (10.5) можно записать в форме С (О л; Со (1 - m cos соу t), (10.5") совпадающей с (10.4). Выражение, аналогичное (10.5"), можно составить и для параметрической индуктивности L (t), управляемой током. При установлении соотношений между зарядом,током и напряжением на параметрической емкости следует исходить из очевидных выражений q{t)-=C{t)uc{t), (10.6) i(t)=Cit)+Ucit)-f, (10.7) dt dt dt cit)-t)-iiit)clL (10.8) Для параметрической индуктивности L (t) имеют место следующие соотношения, связывающие потокосцепление Ф, напряжение Ul и ток 0{t)-L{t)i(t), (10.9) a.(0---Lro + .-(0 ~, (10.10) dt dt dt Следует подчеркнуть, что в выражениях (10.6) - (10.11) С (/) и L (t) рассматриваются как линейные емкость и индуктивность. Отметим принципиальное отличие реактивных элементов от резистивных; дифференциальные емкость и индуктивность не могут быть отрицательными Ч Физически это объясняется тем, что увеличение напряжения на емкости не может вызывать уменьшение зарядов,а увеличение тока через индуктивность не может приводить к уменьшению потокосцепления. Иными словами, энергия, запасаемая в электрическом поле конденсатора или в магнитном поле катушки, не может быть отрицательной. В дальнейшем изложении элементы с изменяющимися во времени параметрами R (i), С (t) и L (t) будут рассматриваться как линейные; к ним применим принцип суперпозиции. Термины «дифференциальное сопротивление», «дифференциальная емкость или индуктивность» частот будут опускаться. Цепи с переменными параметрами играют очень большую роль в радиотехнике и электронике. Можно говорить о двух принципиально различных видах изменения параметров: Имеются в виду обычные элементы. С помощью же усилительных схем с обратной связью можно имитировать отрицательные С и L. [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [ 101 ] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] [137] [138] [139] [140] [141] [142] [143] [144] [145] [146] [147] [148] [149] [150] [151] [152] [153] [154] [155] [156] [157] [158] [159] [160] [161] [162] [163] [164] [165] [166] [167] [168] [169] 0.0018 |