
|
|
|
Главная Системы коммутации [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [ 34 ] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] 4.7 Управление по записанной программе Вспомним об основном отличии электронной коммутации от электромеханической. Еще до цифровизации телефонных станций, появились технологии централизованного, а затем и распределенного программного управления АТС, те. обслуживание вызовов и другие функции узла коммутации стали выполняться управляющими процессорами. Ранние версии электронных станций были снабжены оперативной памятью для хранения информации об обслуживаемых вызовах и полупостоянными запоминающими устройствами, которые хранили программы управления узлом. Эти первые электронные АТС назывались станциями с управлением по записанной программе (SPC). Интеллект первых станций с SPC находился в одном процессоре, который управлял всеми внешними устройствами и для надежности дублировался. В современной цифровой АТС имеется несколько процессоров и применяется распределенная архитектура программного обеспечения и аппаратных средств. Более подробно эти вопросы рассмотрены в главе 9, посвященой программному управлению АТС. Реализация функций техобслуживания современного цифрового узла коммутации также восходит к ранним станциям с SPC, которые были полностью зависимы от единственного процессора, ответственного за выполнение всех функций узла коммутации. Все вопросы эксплуатационного управления АТС, включая техобслуживание, будут рассмотрены в главе 10. Глава 5 Импортные цифровые АТС Каждый выбирает для себя Женщину, религию, дорогу. Ю. Левитанский 5.1 Выбор АТС Возможно некоторым читателям, особенно студенческого возраста, материал этой главы покажется чрезмерно приземленным по отношению к выбранному эпиграфу, но и они вскоре поймут, насколько непросто бывает Оператору выбрать для своей сети коммутационное оборудование того или иного типа. Прежде чем мы перейдем к рассмотрению разных типов АТС, представленных на обширном отечественном телекоммуникационном рынке, хотелось бы разделить их на два основных класса. Разделение на классы, абсолютно недопустимое, по мнению автора, в человеческом обществе, применительно к неодушевленным предметам - цифровым АТС - в сегодняшних условиях представляется целесообразным. Речь идете делении их на «наши» и «не наши», и, следуя такой классификации, эту главу мы посвятим импортным коммутационным платформам с программным управлением, а следующую - отечественным цифровым АТС. Относя те или иные коммутационные платформы к «нашим» или «не нашим», автор руководствовался исключительно здравым смыслом, а не формальным наличием или отсутствием статуса отечественного производителя, что характеризует, скорее, успешность работы маркетинговых служб в заграничных компаниях и гибкость отечественных чиновников, а не реальное знание архитектуры и исходных текстов функционального программного обеспечения, состав- ляющего суть той или иной коммутационной платформы. В главе о программном обеспечении АТС мы еще вернемся к этому вопросу. Здесь заметим лишь, что таким реальным знанием платформы обладают, как правило, только ее разработчики. Автору известны всего два исключения из этого правила - два примера, когда многолетние творческие усилия квалифицированных специалистов позволили им овладеть коммутационной платформой, первоначально разработанной в другом месте, переписав при этом практически все программное обеспечение и переделав практически всю аппаратную часть. Первый пример - разработанная американской компанией ITT система 1240, перешедшая затем в собственность французской компании Алкатель (при покупке ею всех зарубежных отделений ITT) и ставшая хорошо известной во всем мире и у нас в стране Системой 12, которая будет рассмотрена в этой главе далее. Вторым примером является рассматриваемая в следующей главе российская станция АТСЦ-90, разработанная на базе хорошо зарекомендовавшей себя у связистов бывшего СССР финской АТС DX-200 с использованием переданной компанией Нокиа документации. Но сначала поговорим об эволюции АТС. Сегодняшние лавинообразный рост количества пользователей услугами Интернет, изобретение множества новых телекоммуникационных услуп новые технологии доступа и мобильности определили концептуальные аспекты технической политики в области развития коммутационных узлов и станций сети общего пользования. 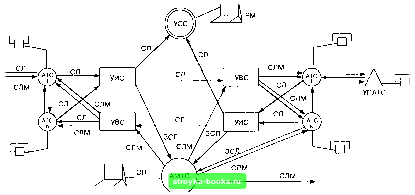 Рис. 5.1 Традиционная структура ГТС ВСС РФ конца XX века На рис.5.1 представлена упрощенная структура городской телефонной сети, рассматриваемая в курсе сетей связи. Существующие коммутируемые телефонные сети общего пользования (ТфОП) создавались для обслуживания речевого трафика, те. для предоставления традиционных услуг телефонной связи POTS (Plain Old Tele- [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [ 34 ] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] 0.0011 |