
|
|
|
Главная Нелинейные системы управления [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [ 62 ] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] [137] [138] [139] [140] [141] [142] [143] [144] [145] [146] [147] [148] [149] [150] [151] [152] [153] [154] [155] [156] [157] [158] [159] [160] [161] [162] [163] [164] [165] [166] 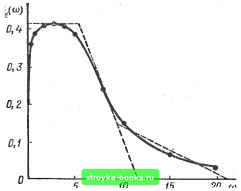 Рис. 9.15 Пример 9.2. Решить предыдущую задачу графоаналитическим методом. 1. Находим выражение для спектральной плотности ошибки: 5,(w) = jcoO+jcuT) T{jo,r + (i(o) + K 2Dg Tg Ты* + {2DgTg + K NTg) a + KN ~ [Та* + 0-2КТ)а + КЦ(1+(йТ) " Подставляя числовые значения параметров, получаем (со) = (40й)4 + 400tu2 + 0,25)/ [(0, 01 со« + 25) (400со2 + 1)]. Задавая различные значения со в пределах от О до 20, вычисляем (со) и записываем результаты: со...... О 0,1 1 2 3 5 8 10 15 20 S(o)) . . . 0,01 0,32 0.4 0,425 0,425 0,4 0,25 0,16 0,06 0,03 2. Строим график (а) (рис. 9.15), разбивая который на типовые фигуры (прямоугольники, треугольники, трапеции) находим величину площади П, ограниченной кривой (сй) и осью абсцисс: Я= Scu)dcu = 4,7. о 3. Определяем среднее значение квадрата ошибки, равное в данном случае дисперсии ошибки: S- (ш) d(o S = 1,49, и среднеквадратическое отклонение ошибки: о =Ke- = !,22В. Следует отметить, что рассмотренная выше задача быстрее и проще решается аналитическим методом, который к тому же позволяет установить аналитическую связь между величиной средней квадратической ошибки и параметрами системы. Приближенный графоаналитический метод интегрирования спектральной плотности целесообразно применять лишь при значениях п > 4, когда аналитический метод оказывается слишком громоздким. Пример 9.3, Решить предыдущую задачу при условии, что на входе замкнутой системы действует регулярный полезный сигнал g(/)==a-f Vi, где о = 10 В; V = \ В/с. Случайная помеха F (t) типа «белый шум» имеет спектральную плотность Sf (<о) = N. 1. Так как полезный сигнал g (t) - регулярная функция времени, то среднее значение квадрата ошибки в соответствии с (9.94) Р=/п(.о+с=«г(о+в7. где {/) ~ W gf, (s) 8 С) - динамическая составляющая ошибки, обусловленная регулярным полезным сигналом g {/); = - среднее значение квадрата случайной составляющей ошибки, обусловленное случайной помехой F (t). Величина Ef была определена в примере 9.1, она равна sf = К N/2. 2. Определяй установившееся значение регулярной составляющей ошибки /Ttg (/) методом коэффициентов ошибок: me()=cog(0 + c, -+--.f ... . . .- Для нахождения коэффициентов ошибок Сд, с,, с, ... разложим Передаточную функцию Vlg (s) = 1/[1 + W (s)], связывающую полезный сигнал и помеху, в ряд по возрастающим степеням s, что удобно, например, сделать, разделив числитель выражения для WJs) на его знаменатель: s + Ts 1 КГ-1 -c„-!-c,s+--s2+....; следовательно, == 0; tl = cj2\ = (КТ - \)/К. В нашем случае dg (t)ldt = V, а все последующие производные от полезного сигнала равны нулю. Поэтому окончательно получаем m(t)=Q-e(t)+Ci-+ -0=Cidg(t)ldt=V/K. 3 Находим результирующее значение среднего квадрата ошибки: Подставляя числовые значения коэффициентов, получаем Г» = (1/5)" + (5 0,01)/2 = 0.065. Средняя квадратическая ошибка ес.к -!К?-0.255 В. § 9.7. Синтез линейных систем с минимальной средней квадратической ошибкой Рассмотрим систему автоматического управ.ления с передаточной функцией IFa (s), служащую для усиления и преобразования управляющего полезного сигнала С(/) при наличии случайной помехи F(t). Это преобразование в общем случае производится в соответствии с некоторым заданным оператором (алгоритмом преобразования) H(s) (рис. 9.16). В общем случае система должна возможно более точно воспроизводить на своем выходе не само управляющее воздействие G{t), а некоторую функцию от управляющего воздействия Z(/) = H{s)G(t). (9.107) В системах, находящихся под воздействием случайного (или регулярного) полезного сигнала и случайной помехи, возникает задача отделения полезного сигнала от помехи и подавления (фильтрации) последней. Эту задачу называют задачей фильтрации или сглаживания. Введение преобра-зующего оператора H{s) обобщает задачу не SjH - I p/i) только на обычные еле дящие системы, у кото рых Z(0 = С(0 1т. е H{s) = П. но и на дру гне классы систем, вы полняющие различные преобразования управ-Рис. 9.16 ляющего сигнала. Git) [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [ 62 ] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] [137] [138] [139] [140] [141] [142] [143] [144] [145] [146] [147] [148] [149] [150] [151] [152] [153] [154] [155] [156] [157] [158] [159] [160] [161] [162] [163] [164] [165] [166] 0.0016 |
|||||||||||||||