
|
|
|
Главная Развитие народного хозяйства [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [ 79 ] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] ющего изменения коэффициента усиления звеньев, расположенных после указанного нелинейного звена; 3) распределение коэффициента усиления между отдельными звеньями должно производиться так, чтобы у звена, на один вход которого в начальный момент работы модели подается напряжение, по значению близкое к номинальному напряжению усилителя, а иа другие входы подается напряжение обратной отрицательной связи через звенья с большими постоянными времени, был небольшой коэффициент усиления, обеспечивающий работу усилителей на линейной части характеристики. Небольшой коэффициент усиления должен быть и у звена, следующего за усилителем-интегратором, на выходе которого задается напрянкние (близкое к 100 В), соответствующее начальным условиям. Обычно коэффициент усиления первого суммирующего усилителя (входного звена) принимается равным единице, а коэффициенты усиления следующих звеньев (в направлении передачи воздействии) увеличиваются и тем больше, чем больше их постоянная времени или постоянные времени предшествующих им звеньев, но так, чтобы в установившемся режиме выходное напряжение усилителей не превысило 80-100 В. Коэффициент усиления последнего звена в прямой цепи (например, звена, выходное напряжение которого задает частоту вращения двигателя) и коэффициент усиления в цепи обратной связи (по частоте вращения двигателя) согласуются с задающим напряже-ипем так, чтобы с учетом возможного перерегулирования напряжение выходного звена НЕ превышало допустимых 100 В. При этом используется соотношение вых,у • 1 + *ОбЩ *о,с (1-425) где осщ - общий коэффициент усилення прямой цепи (на модели); feo,с - принятый на модели коэффициент обратной связи; 4) после выбора коэффициентов усиления отдельных звеньев масштабные коэффициенты определяются следующим образом. Поскольку задаются определенным значением задающего напряжения на входе первого суммирующего усилителя или определенным значением напряжения на выходе интегратора, имитирующего начальные условия, и известны действительные значения физических величин в системе автоматического регулирования, то масштаб для любой нз этих переменных будет: (1-426) где Xi принятое значение напряжения на модели; Xi - значение физической переменной, соответствующее напряжению л;; i- индекс физической переменной (номер звена). Тогда масштаб переменной на выходе звена, на вход которого подано напряжение Хг, находится по выражению тг+1=Щ -iXL, (1-427) где fej+i - действительный коэффициент усиления (i+l)-ro звена в структурной схеме системы; k. - принятый коэффициент усиления соответствующего звена модели. Переходя далее к следующим звеньям в направлении передачи воздействия, получаем: Щ+п=-т1+п-1~. (1-428) «г-f-n Наоборот, при переходе к соседнему звену в направлении, обратном направлению передачи воздействия, будем иметь; kj-n+i (1-429) После обхода всего замкнутого контура системы мы снова возвращаемся к начальному t-му звену и аналогичным образом определяем масштаб соответствующей ему i-й переменной. Если вычисленное значение масштабного коэффициента совпадает с первоначальным (принятым), то определение масштабных коэффициентов произведено правильно. В этом случае можно быть уверенным, что общий коэффициент усиления замкнутого контура сохранился заданным в структурной схеме. Масштаб переменной на выходе нелинейных звеньев, осуществляющих операции умвонения или деления, зависит от использования этих звеньев. Примеры выбора и расчета схемы набора на модели Пример 1. стана. Система Привод клети прокатного i-Д с двухзонным регулированием скорости. Двигатель 4300 кВт, 750 В, 6100 А. Структурная схема системы управления электроприводом дана на рис. 1-305. Значения физических переменных заданы в относительных единицах. Расчетные значения коэффициентов усиления и постоянных времени передаточных функций в структурной схеме заданы следующими: а=1; imox=2,5; Фтазс=1; Фтгп=0,53; *ф1=1,24; ф2--=4; р=0,104; Гц=0.01с; в, д=0,0235с: Гхв,д=1.84с; Г„в,д=0,0135с; Гэ=0,055с; Тэм=0,102с; Гф=0,01с; Гв=0,01 с. Ограничения выходных напряжений регуляторов и делительных устройств указаны на структурной схеме (в относительных единицах).  px8(2Tf,+ T)p Фильтр аталонного напряжения рильтр А-нХ)-1ТЬм2>-/ Регулятор Вентильный тока. преобразова- двигатель ТзмР Регулятор э.д.с. Регулятор тока возбуждения днтильный Обмотка 4 возбудитель возбуждения
Рис. 1-305. Структурная схема системы управления электроприводом мети прокатного стана. Решение. В соответствии со структурной схемой и табл. 1-43 схема набора на моделирующей установке принимает вид, показанный на рис. 1-306. Выбор масштабов. Принимаем следующие масштабные коэффициенты электрических и технологических величин: Эталонное напряжение ... 40 Выходное напряжение регулятора частоты вращения /ир.с.....40 Ток и момент двигателя /и,- . . . 40 Выходное напряжение регулятора тока тр,т...........40 Напряжение вентильного преобразователя и э. д. с. двигателя те,. . 40 Выходное напряжение э. д. с. тр.в.д.с...........40 Скорость Шь.........40 Входное напряжение регулятора возбуждения тф........100 Выходное напряжение регулятора возбуждения m.g........20 Напряжение вентильного возбудителя т„............10 Поток возбуждения двигателя 100 Определение коэффициентов усиления звеньев на модели (перераспределение коэффициентов усиления в структурной схеме) а) Система управления напряжением на якоре двигателя Фильтр эталонного напряжения Регулятор скорости (частоты вращения) : для пропорциональной части регулятора Пм-4(2Г-ЬГф) р.8(2Г-ЬГф)? ТзмЯр.с " 2Р(2Г+Гф)тз, 0,102-40 «гэт =16,34: 2-0,104 (2-0,01+0,01) 40 для интегральной части регулятора ;з>с р 8(27-Гф)? тэт" 0,102 0,104-8(2-0,01+0,01)2 Регулятор тока pTgnij 0,104-0,055-40 2-0,01-40 0,104-40 = 136,6. 2Тп1, ц--Р-с 2Ттр 2-0,101-40 Вентильный преобразователь = 0,286; =5,2. "•р>т orpi- bime=l,24-40=49,5 В. 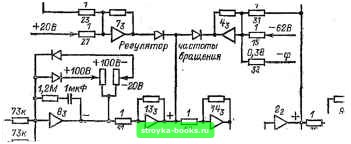 Управление напряжением на якоре ВВигателя Задатчик и фильтр эталонного напряжения кг=0,в35 ib2i Ч .1 ; J. РегупятЬр э.д.с, Н>Н<3-1 кгч=10 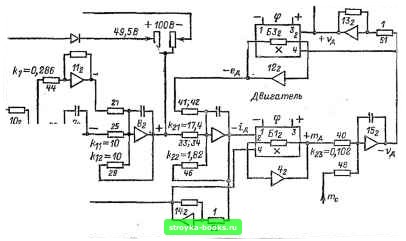 l<B=0,5Z TjРегулятор тона-- вентильный преобразователь 4S k2S=10 к 1=1,06 . 3 Управление Возбуждением двигателя Регулятор тока возбуждения -.-К!- 100В +100 в-
.1 ; г -Of- fice + 10DB- + J1 K5=0/fi? кцО,Ш кч1=10 Вентильный. Возбудитель Обмотка Возбуждения Is кчг=20 к;=0,Ш §1 к,2=.0,05Ч5 k5S=10 45 k54=Zf +50 Рис. 1-306. Схема набора на модели системы управления электроприводом клети прокатного стана. [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [ 79 ] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] 0.0013 |