
|
|
|
Главная Развитие народного хозяйства [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [ 76 ] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] 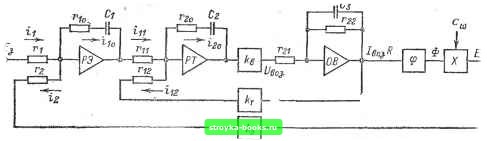 Рис. 1-302. Структурная схема регулятора э.д.с. с последовательным включением регуляторов. регуляторы э. д. с. и тока возбуждения соединены последовательно (рис. 1-302), а процесс реверса потока происходит при угловой частоте 2о)о (о)о - основная частота, соответствующая номинальному потоку Фн). При подаче на вход регулятра э. д. с. задающего сигнала обратной полярности произойдет размыкание системы и через некоторое время замыкание ее при ненулевых начальных условиях. В процессе торможения двигателя момент статической нагрузки принят равным О, и действие обратной связи по э. д. с. проявится с момента достижения потоком после перемены знака значения 0,5Фн. Действие обратной связи по току возбуждения проявится позднее после снилсе-ния сигнала на выходе регулятора э. д. с. до значения, при котором он сравняется с сигналом обратной связи по току возбуждения. Напряжение на выходе регулятора тока возбуждения i/р.т при этом равно напряжению на конденсаторе Сг цени обратной связи t/jo- Напряжения конденсатора цепи обратной связи Ci, а таюке регулятора э. д. с. (РЭ) Uio и V20 являются дополнительными возмущающими воздействиями, соответствующими ненулевым условиям замыкания системы. Несоответствие тока возбуждения /воз.о в момент замыкания системы напряжению U20, обеспечивающему форсированное изменение, учтено в виде еще одного возмущающего воздействия, приложенного к входу звена: напряжение возбудителя- ток возбуждения. Это воздействие определено из уравнения электрического равновесия возбздителя = /воз (Р) (1 Л рТъоъ)-воз.о воз (1-385) и равно /воз.оГвоз. к системе пршюжено управляющее воздействие £з (к входу усилителя РЭ) и три возмущающих воздействия ю, /20, /воз, овоз соответственно к входам усилителя РТ, возбудителя fee и к звену возбудитель - ток возбуждения двигателя. Для управляющего воздействия пере- даточная функция замкнутой системы имеет вид: зам (Р) = (1-386) Р + «СЭ Здесь о)с,э - частота среза регулятора э. д. с: "с,э • , „ 2д,т и,э (1-387) Составляющая э. Д. с. двигателя, соответствующая этому воздействию, ЕЧр)==.-- . (1-388) pri Р -Ь Юс.э Передаточная функция прямых звеньев ДЛЯ возмущающего воздействия ю Яр (р) = - " . (1-389) КД,Т P + 0)i..,.i где о)с,т -частога среза разомкнутого регулятора тока возбулсдения: кв /гд.т • и.т (1-390) Передаточная функция звеньев обратной связи Я(р)= "--/э- (1-391) Р/ И.э Передаточная функция замкнутой системы йдд (р + (Ос,т) (Р + (йс.э) (1-392) (получена с учетом равенства 7к,э= 1/о)с,т). Составляющая э. д. с. двигателя от воздействия tlo £"(Р)=- 10 Шс.т <Дс,э Тя.э (Р + о>с,т) (Р + Юс,э) (1-393) Передаточная функция прямых звеньев для воздействия f 20 Г Р воз Передаточная функция звеньев обратной связи (1-395) Передаточная футн<ция замкнутой системы Язам (Р) = Р + ; Теоз X (Р + Ос.э) (р + (Ос,т) X (1-396) Составляющая э. д. с. двигателя от воздействия С/го f 20 fep фсюр £"(Р)- / 1 \ Гвоз(р + г- \ воз / (р + Шс.т) X Х(р + о>с.э) (1-397) Передаточная функция замкнутой системы для воздействия /поз, о Твоз отличается от (1-396) только отсутствием коэффициента кв- Составляющая э. д. с. двигателя от воздействия /воз,0 7"воз / 1 \ р + -- Кр + юс.т) (р + юс,э) \ воз / Электродвижущая сила двигателя Е (р) = Е (р) -1- Е" (р) + Е" (р) Ч- (р). (1-398) Оригинал этого выражения Е (t) = £ (о + Е" (о + (о -Ь £"" (0; (1-399) ЕзГ2 \ ~<о.э Ц. (1.400) Я (() = Е" (о = = Uio «ст ь>с,э Ти.э (1-401) Ткт 12 - (Ост б 1 \ г-- «ст воз / - ti>c.3 е («СЭ - Ь>с,т) ; (1-402) -- Юс,э) (о)с,т - 0)с,э) \ воз / £""() = /воз,о/?возСфюХ ( Гвоз ) ё-"воз 1 \ "с,э- ;,э «сд) -0), с.,т ;,т - Шсэ) (--- «с,э) V воз /J . (1-403) После преобразований Е=-г, + Ае~ + ве~ «с.т + (1-404) 0)с,Т - «»С,Э «о>с,т - воз / й>с,э - (1-405) В=£з Юс,т - -ПО), воз (1-406) Тгоз е поз £3 а 1 -m <»с,э - еоз (1-407) (1-408) где /воз, зам - ТОК возбуждения, соответствующий моменту замыкания РТ; JUcUno (1-409) Iвозо R т характеризует собой коэффициент форсировки возбудителя. На рис. 1 303 приведены кривые Е= =f(t), которые свидетельствуют о значи- 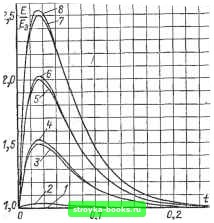 Рис. 1-303. Кривые E/Es=f(t) при реверсе потока двигателя и о)с,т=60 1/с, (йс,э=30 1/с, Твоз=1 с. 7 -m=I; п=и 2 - m=i, п=!: 3 -т-=!; n=2; 4-m>=4, л=2; 5 -m-l, n=3; 6 - m-i, n=3; 7 -m=I, n=4; S - m=4, n=4. тельном перерегулировании, опасном как для двигателя из-за возможности возникновения кругового огня на его коллекторе, так и для вентильного преобразователя из-за возможности опрокидывания инвертора. Перерегулирование существенно зависит от и и в меньшей степени от т. 3. МОДЕЛИРОВАНИЕ ПЕРЕХОДНЫХ ПРОЦЕССОВ В СИСТЕМАХ ЭЛЕКТРОПРИВОДА 1-56. АНАЛОГОВОЕ МОДЕЛИРОВАНИЕ Назначение, методы. Принцип аналогового моделирования. Моделирование переходных процессов является составной частью работ по проектированию систем электропривода. С его помощью уточняются параметры и структура корректирующих звеньев, найденных расчетным путем для линеаризованных систем автоматического регулирования. Данные моделирования, про- веденного на стадии проектирования, могут использоваться как справочный материал для сравнения и контроля переходных процессов в налаживаемых системах электропривода. По своему методу моделирование может быть физическим и математическим. В основу метода физического моделирования положено изучение процессов на моделях одной физической природы с оригиналом. Этот метод позволяет не только исследовать явления, не имеющие математического описания, но и дает возможность получить необходимые для такого описания данные. Физическое моделирование наиболее эффективно используется для исследования процессов при разработке отдельных регуляторов, входящих в комплекс системы автоматического регулирования. Прн этом остальные части системы могут моделироваться с помощью физических моделей или с помощью математических моделей на цифровых или аналоговых вычислительных машинах. Математическое моделирование основано на тождественности дифференциальных уравнений, описывающих процессы в оригинале и функциональные зависимости между выходными величинами на модели. При этом физическая природа процессов, протекающих в модели, может быть не только отличной от таковой в оригинале, но и сами эти процессы могут описываться совершенно другими дифференциальными уравнениями. Метод математического моделирования является универсальным, так как он позволяет с помощью одного вычислительного устройства решать практически любые задачи, имеющие математическое описание. В практике проектирования систем автоматического регулирования и управления электроприводами наиболее успешно применяется математическое моделирование с использованием аналоговых вычислительных устройств, выполненных на электронных усиоштелях постоянного тока с большим коэффициентом усиления (примерно 40 000) и глубокой отрицательной обратной связью. К достоинствам электронных моделирующих машин (аналоговых моделей) относятся быстрота и легкость перехода от решения одной задачи к решению другой, возможность введения переменных параметров и нелинейных зависимостей, простота введения различного рода систематических и случайных возмущений, а также возможность визуального наблюдения исследуемых процессов в широком диапазоне масштабов времени. В случае совместной работы с физической моделью другого объекта или с самим этим объектом масштаб времени на аналоговой модели принимается равным единице (процессы моделируются в натуральном времени). Сопряжение аналоговых моделей с реальной аппаратурой систем электропривода затруднений не вызывает, поскольку выходные величины модели и реального объекта обычно имеют одинако- [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [ 76 ] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] 0.0012 |