
|
|
|
Главная Развитие народного хозяйства [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [ 71 ] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] 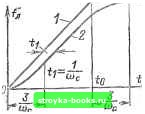 Рис. 1-279. Линейное изменение задания и выходной величины в системе 1. / - изменение задания; 2-изменение выходной величины. реакция на ступенчатое воздействие -Q„ t /т=1 скоростная ошибка 1 (1-296) (1-297) Соответствующие кривые представлены на рис. 1-278, где по оси абсцисс отло}кен безразмерный временной параметр Ис/. Под продолжительностью переходного процесса понимается время от начала процесса до того момента, когда значения функций отличаются от своих установившихся значений не более чем на 5%. Для систем 1 это время определяется по выражению Мс/у = 3. (1-298) На рис. 1-279 изображено линейно-нарастающее задание, достигающее установившегося значения при t=to, и изменение выходного значения. Из рнс. 1-279 следует, что в начале процесса скоростная ошибка равна нулю, а через время /у«3/мс она достигает 95% своего установившегося значения, равного 1/Ис. После этого выходная величина нарастает практически с той же скоростью, что и задание, отставая от него во времени на /i=l/(Sc. С момента прекращения роста задания (to) для выходной величины понадобится время /у!«3/(0с, прежде чем она достигнет практически установившегося значения. Система 1, являясь астатической системой первого порядка, имеет установившуюся скоростную ошибку, равную 1/Wc- Система 0-1 (ЛАЧХ на рнс. 1-280, кривая /) представляет собой апериодическое звено с коэффициентом усиления к и постоянной времени Т. Частота сопряжения участков с нулевым и единичным наклоном (00=1/7-. При единичном ступенчатом воздействии установившаяся ошибка системы 0-1 равна: А = . . , или при ft > 1 Д »-. 1-f ft Ее передаточные функции в разомкнутом и замкнутом состоянии соответственно равны: 1 + рГ р -f ( Wo (1-300) Язам (Р) = k<i>o (1-301) p + (ft-f 1)(0о Установившаяся ошибка для системы 0-1 не равна нулю и определяется уравнением (1-299). Ошибка системы 0-1 при линейном возрастании задания имеет две составляющие: одну тождественную скоростной ошибке в системе 1, и вторую, возрастающую линейно из-за конечной статической ошибки по заданию (рис. 1-281). Вторая составляющая называется позиционной ошибкой. При ft>l (практически при ft>5) частота среза (Oc«ft(0o (ошибка менее 4%) и оригиналы функций (табл. 1-35) принимают вид: 1 + ft /и = (Осе / k+i (1-302) (1-303) 1+ft (Ос 1 -е (1-304) Несмотря на то что в установившемся режиме система 0-1 имеет принципиальные отличия от системы 1, в переходных режимах (за период от О до Зозс/) для значений ft>5 обе эти системы ведут себя практически одинаково. 20 16 12 8 Ч О ьс 0,8uc О.Выс 0,Чь>с 0.2ы, О
2 woi * 5 6 У 8910 ыО 05 1
(1-299) Рис. 1-280. Логарифмическая амплитудно-частотная характеристика и единичные переходные функции системы 0-1 для / - ЛАЧХ системы; г-реакдия иа импульс; 3 - реакция на единичное ступенчатое воздействие. Рис. 1-281. Ошибка системы 0-1 при линейном возрастании задания для ft=5. / - позиционная ошибка: 2 - скоростная ошибка; 3 - результирцощая ошибка.
20 16 12 8 4 20lg%(j<j)\
fkrg T = 1c
Пример. Рассчитаем показатели переходных процессов в системе электропривода постоянного тока с регулятором частоты вращения при постоянном потоке двигателя. Индуктивность якорной цепи двигателя примем равной нулю. Структурная схема такой системы и ЛАЧХ представлены на рис. 1-282. Эта система является системой 0-1 е коэффициентом усиления fe=9, частотой среза Wc = =9 1/с. Расчет ведем для трех случаев. Ступенчатое изменение задания на величину АОз=0,Шн при нулевом статическом моменте. Из (1-275) и (1-303) следует: ДО=АОз fe-H 1 -е = 0,09Qh(1 - е"°)- Время переходного процесса =0.3 с. ft+1 «с Рис. 1-282. Структурные схемы и ЛАЧХ системы регулирования частоты вращения при 7я=0. а - структурная схема замкнутой системы; б - структурная схема преобразованной разомкнутой системы регулирования; в - ЛАЧХ системы 0-1; / - усилитель и вентильный преобразователь; 2а к 26 - двигатель; 3 - тахогенератор. Установившаяся ошибка АОз - AQy 1 ДОз = 0,1. Ток двигателя определяется с помощью (1-276) и (1-302). Если принять Гэм=1 с, /?=0,1£д,н н, где /и - номинальный ток двигателя, то получим; днн д,н„ Айз в начальный момент времени (/=0) бросок тока достигает недопустимого значения 9/н. Таблица 1-35 Переходные функции системы 0-1 Реакция Изо6ражеш1е Оригинал На импульс kcOo P+(k+l)4,o На ступенчатое воздействие Ошибка при линейном воздействии задания Р + «р Р [р + (Й+1)С0о1 fe-f 1 feWp Линейное возрастание задания со скоростью ез=0,Шн 1/с. Из (1-278) и (1-303) находим динамический ток двигателя: дни -Д,Н 3 эм , RI ""Qnfe-fl о.эО--»")- OK не превосходит Динамический ток 0,9/н. Наброс статической нагрузки /ст=/н. Пренебрегая влиянием изменения э. д. с. двигателя при приложении возмущающего воздействия в структурной схеме рис. 1-282, разомкнем внутреннюю обратную связь по э.д.с. двигателя. При этом система трансформируется в систему типа 1 и ее передаточная функция для разомкнутого состояния fey.n fee = -; ис = 9 1/с. Р Из (1-280), (1-282), (1-297) и (1-303) находим: ток двигателя / = /,Л1 в-"«)=/н{1~е-«0: изменение скорости двигателя = 0,011(1 -e-S). Система является статической по возмущению. Установившаяся ошибка но скорости, равная 1,1%, достигается через время Ц = - = 0,33 с. «с п о- Реакция систем второго рядка Система 1-2 представляет собой сочетание интегрирующего и апериодического звеньев. К таким системам, например, относится следящая система с электродвигателем постоянного тока, у которого индуктивность якорной цепи принята равной нулю (рис. 1-283). Передаточная функция разомкнутой системы 1-2 Яр (р): «с «с Wo р(1+рГ) р(р-fcoo) (1-305) (для следящей системы на рис. 1-283 7"= TsmJ Обозначим m=Mo/Wc, тогда Яр(р) = р (p-f mwc) (1-306) -8 -12
•К> Н(р)
Рис. 1-283. Логарифмическая амплитудно-частотная характеристика и структурные схемы системы 1-2. с -ЛАЧХ; 6 - структурная схема следящей системы с электродвигателем постоянного тока при =0; .81 -структурная схема той же системы в разомкнутом состоянии при =0; сФ -поток двигателя; fl - угловая скорость; G g - задаваемый путь; 6 - Путь, проходимый двигателем. Передаточная функция замкнутой системы 1-2 Язам(р) =- р -fmo) p-f/nw (1-307) Для m>4 переходные функции системы 1-2 будут иметь апериодический характер, для т< 4 -колебательный характер. Значение т-А соответствует критическому режиму, граничному между апериодическим и колебательным. Апериодический режим (табл. 1-36). При т>4 уравнение (1-307) может быть представлено в виде Язам(Р) = таг: (P+Wi) (р + ©г) «2= Wc т 1 f (1-308) (1-309) (1-310) В отличие от систем 1 и 0-1 значение реакции на импульс равно нулю в начальный момент времени. [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [ 71 ] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] 0.0012 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||