
|
|
|
Главная Развитие народного хозяйства [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [ 65 ] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] НН=±1 > з,п 9,55 См Ф Jp Рис. 1-261. Структурная схема системы регулирования тока с ПИ-регулятором при работе в зоне прерывистых токов. тельно к среднему значению тока для этого случая можно принять равной нулю. На рис. 1-261 приведена структурная схема системы регулирования тока с ПИ-регулятором в зоне прерывистых токов. Передаточная функция контура тока имеет вид: зоне непрерывного тока до больших зна- чений - B + Ts в зоне прерывис- тых токов. Переходный процесс тока при этом будет характеризоваться некоторым убыстрением нарастания тока вначале за Rs *т (1-f ГэР)
(1-258) р+1 где Вт - постоянная времени интегрирования контура тока. В (1-258) значения Вт, Гэм соответствуют значениям при непрерывном токе, а нх фактическое изменение в зоне прерывистых токов учитывается с помощью коэффициентов Rs.n/Ro и Ле/Лв,п. Коэффициент 1 + учитывает "в.п влияние внутренней обратной связи по э. д. с двигателя. Как следует из (1-258), в зоне прерывистых токов резко уменьшается быстродействие системы регулирования, так как член при р возрастает от значения Вт в счет форсирующего члена в числителе передаточной функции и последующим медленным нарастанием. Уменьшение быстродействия контура тока вызывает ухудшение демпфирования или неустойчивость контура регулирования частоты вращения, параметры которого выбираются, исходя из быстродействия контура тока в режиме непрерывного тока. На рис. 1-262 приведена структурная схема системы регулирования тока с внутренним контуром регулирования напряжения двигателя. Регулятор напряжения выполняется интегральным, а регулятор тока интегральным по входу и интегрально-пропорциональным по каналу обратной связи по току [1-22]. > 1 1 1 1 Рис. 1-262. Структурная схема системы регулирования тока с внутренним контуром регулирования напряжения двигателя 2 - вентильный преобразователь; 2- регулятор напряжения; 3 - регулятор тока. Передаточная функция контура регулирования напряжения при выбираемых обычно высоких частотах среза имеет вид; 1 R, где бн=С1/?2/*н6в -постоянная интегрирования контура регулирования напряжения. При настройке постоянная времени интегрирования Ва должна выбираться как можно меньше. Для этого необходимо свести до минимума малые постоянные времени контура. Если аппроксимировать передаточную функцию преобразователя звеном чистого запаздывания с временем запаздывания Тзап=1/2п1Д то предельное значение постоянной интегрирования, при которой отсутствует перерегулирование, равно Тзап. В этом случае для мостовой схемы Дн= = 1,6-10-3 с. Передаточная функция контура тока в режиме непрерывного тока с учетом (1-259) имеет вид: {р) = Дт Бн Тд Ri 1 Rg \+В1Т ВАВ + Тд) B+Ti 1 + B/Tgj (1-260) ..т го R CRjRgkRj где Ti = Сз Ri, Вт=----. Из (1-260) следует, что быстродействие системы определяется не постоянной времени интегрирования б,, как это было в системе на рис. 1-261, а постоянной Дт-Ь Постоянная времени Вт в этой системе выбирается значительно меньше, чем постоянная Г, и постоянная времени Вт в системе, приведенной на рис. 1-261. При практически реализуемых быстродействиях систем регулирования (/рс=20- -40 мс), сумма Br+Ti приблизительно равна или несколько больше Вт системы, приведенной на рис. 1-261. Таким образом, время регулирования в такой системе определяется в основном постоянной Ti и мало зависит от Вт. Поскольку в этой снетеме постоянная Вт очень мала, влияние внутренней обратной связи по э. д. с. будет незначительно (1--Вт/Гэм«1). Значения Вт и Ti при заданных Тд и Вн могут быть определены на основании диаграммы Вышнеградского [1-29]. Для получения монотонного переходного, процесса необходимо так выб-ирать. 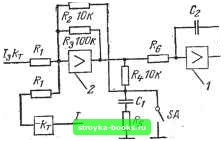 Рис. 1-263. Схема адаптивного регулятора тока. чтобы значения обобщенных координат т и п располагались в областях II или III диаграммы Вышнеградского. Координаты тип равны: Вт(Вя + Тэ) У(ВнВ,7э)? п = - Вт+ 71 Чем меньше постоянные Вт и В„, тем меньше будет время прохождения зоны нечувствительности в регулировочной характеристике преобразователя и влияние накопленных на регуляторах сигналов на переходные процессы тока и частоты вращения [1-30]. В режиме прерывистого тока передаточная функция контура Ri 1 " т,п(Р) = г В„ Вт 1-1-Вт/Тэм в,п 7эм + 7-1 . (1-261) + Р + 1 1+5т/7эм Как следует из (1-261), быстродействие контура при малых значениях В„ и Вг мало зависит от изменяющихся параметров Rs.B, кв,п и определяется в основном независимой от этих параметров постоянной времени Ti. Таким образом, быстродействие системы при непрерывном и прерывистом токах приблизительно одинаково. На практике находит применение рассмотренный регулятор тока и без внутреннего контура регулирования напряжения. Член при р в передаточной функции контура тока при таком- регуляторе равен Яэ,п Bj-fTi. Поскольку Bi этой системы в несколько раз меньше, чем системы, приведенной на рис. 1 -261, увеличение Вт в зоне прерывистого тока меньше сказывается иа увеличении времени регулирования. На рис. 1-263 приведена схема адаптивного регулятора тока. В режиме непрерывного тока ключ SA разомкнут и регулятор работает как интегрально-пропорциональный. При этом на усилителе 1 реализуется интегральный регулятор, а на усилителе 2 - практически пропорционально-дифференциальный. Передаточная функция регулятора в режиме непрерывного тока имеет вид; -f Ri) (R2 + Ri + R3)Ri При этом RbRi, Ri и R3>R2, Rt. Малая постоянная Т выбирается для защиты регулятора от высокочастотных помех. Постоянная времени интегрирования контура Вт выбирается с учетом Т . В режиме прерывистого тока, как было показано, постоянная времени регулятора Тв увеличивает время переходного процесса. Поэтому при определенном значении прерывистого тока замыкается ключ SA и передаточная функция регулятора принимает внд: где k2=Rs/Ri. Таким образом, регулятор становится интегральным, а его постоянная времени интегрирования Вт значительно уменьшается в Отношении ki R + Ri + 1. Имеются две модификации такого регулятора. В первой модификации ключ SA замыкается при фиксированном среднем значении прерывистого тока, а во втором - в моменты времени, когда ток равен нулю. Среднее значение тока в первой модификации снимается с фильтра на выходе датчика тока. Во второй модификации частота переключений зависит от скважности тока и сигнал иа переключение снимается непосредственно с безынерционного датчика тока, т. е. непрерывно учитывает-.,ся:1.измененис Параметров объекта регулирования. На рнс. 1-264 приведена схема адаптивного регулятора тока с усилителями 1, 2, 3 с такими же передаточными функциями в режимах непрерывного и прерывисто го токов, но иначе аппаратно-реализован-ного. В этой схеме предполагается, что в режиме прерывистого тока можно превратить ПИ-регулятор в И-регулятор, если ввести дополнительно инерционное звено. г-С=> /?, \7 SAI Sn., Рис. 1-264. Схема адаптивного регулятора тока с подключаемым инерционным звеном. постоянная времени которого приблизительно равна электромагнитной .постоянной времени цепи якоря. Такой регулятор менее чувствителен к помехам, чем рассмотренный ранее регулятор с ПД-звеном. В режиме непрерывного тока ключи SAl к SA2 замкнуты. При закороченном сопротивлении Rb постоянная времени на выходе усилителя 2 равна CzRa, где /?вы1 - выходное сопротивление усилителя 2. Учитывая, что Квых мало, этой постоянной времени можно пренебречь. Тогда передаточная функция регулятора имеет вид: i?5 С, р -f 1 H(P) = ~f- • R.C,p В режиме прерывистого тока размыкаются ключи SA1, SA2. В результате на выходе усилителя 2 включается инерционное звено. Так как усилитель 3 работает в ре жнме повторителя напряжения и имеет очень высокое входное сопротивление, постоянная времени этого звена будет равна R5C2. В результате передаточная функция регулятора в режиме прерывистого тока будет иметь вид: „ 55C1P + I Яр,п(Р)=- - - R2 + Rb R6C2P + 1 Если выбрать RsCiReCz, то получится интегральный регулятор, постоянная времени интегрирования Вт которого будет уменьшена в (R2+Ra)/R2 раз по сравнению с Вт в режиме непрерывного тока. Значение (/?2-1-/?з) ?2 может достигать 20. [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [ 65 ] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] 0.0016 |