
|
|
|
Главная Развитие народного хозяйства [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [ 56 ] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] 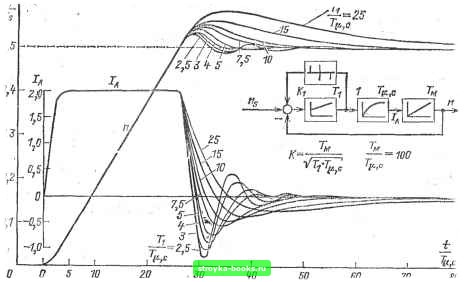 Рис. 1-214. Переходная характеристика разгона под отсечку системы регулирования с параметрами - п Ф-~ = «8 = Ub-K Ri Tk Ri Rskc 0,5 D,f 0,3 D,2 0,1
0 0,2 0,6 1,0 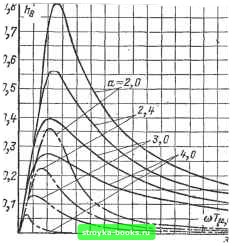 D 0,2 0,4- V,6 0,8 1,0 Рис. 1-215. Амплитудно-частотные харак- Рис. 1-216. Амплитудно-частотные характеристики теристики и(/ш) Rskc система без фильтра на входе; ---. - система с фильтром на входе. - система без фильтра на Е.ходе: =- - система с фильтром на входе. Увеличение К приводит к изменению низкочастотной части характеристики. При jK-oo система регулирования с ПИ-регу-лятором частоты вращения стремится к системе регулирования с П-регулятором, настроенной по модульному оптимуму. Настройка при /С = 4 соответствует настройке по симметричному оптимуму. Для уменьшения перерегулирования частоты вращения при управлении со стороны задания на входе системы можно устанавливать фильтр. Переходные характеристики частоты вращения для различных К при ступенчатом входном сигнале, а также для К = 4, Тф=4Г4 с показаны на рис. 1-218. На рис. 1-219 приведены переходные характеристики ошибки по частоте вращения при ударном приложении нагрузки. Из 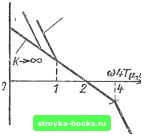 Рис. 1-217. ЛАЧХ разомкнутой системы. 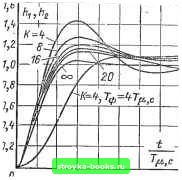 t 8 12 ie Рис. 1-218. Переходные характеристики t \ ц,с / /12 = R4 \ Ц.С / при [7=const; Ri Гэм Се Ф при f/j,x = at. рассмотрения характеристик видно, что с ростом К увеличивается статическая ошибка по частоте вращения, максималшая динамическая ошибка практически не меняется. Рассмотрим еще один тип настройки системы регулирования с ПИ-регулятором частоты вращения при неизменной величине Т=4Т и различных значениях Вс Передаточные функции разомкнутой и замкнутой систем регулирования равны: раз,с(р) = (1-235) зам,с (Р) = (1-236) Фазовые и частотные характеристики системы приведены на рис. 1-220. Реакции системы на ступенчатый входной сигнал и возмущение по нагрузке, полученные на математической модели, показаны на рис. 1-221-1-223. Случай Ti = 4 Т,. и = 6,4 Т определяет настройку на минимальную колебательность, т.е. величина резонансного пика замкнутой системы регулирования достигает минимального значения. При этом перерегулирование несколько меньше, а быстродействие несколько больше, чем при настройке по симметричному оптимуму. Если токовый контур настроен по колебательному закону %т и в конту- 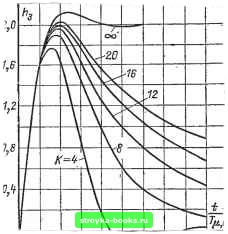 Рис. 1-219. Переходная характеристика AnfA- Rskc /„„ Г при /cT=const. ст Ц.С т (Т) эм Се "j Минимальная колебательность Симметричный оптимум 1 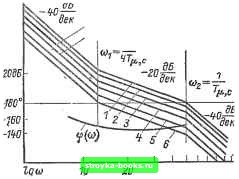 Иногда для удовлетворения технологических требований система регулирования должна обеспечивать отличный от нуля, но меньший, чем при настройке по модульному оптимуму, уровень статической просадки по частоте вращения. В этом случае регулятор частоты вращения выполняется по схеме рис. 1-224. При апериодической настройке токового контура передаточная функция разомкнутого контура частоты вращения 30 W БО 80100 Рис. 1-220. ЛАХ и ЛФХ разомкнутой системы регулирования. / - в = 4Г2 ; 2 - в = 5Г2 ; 3 - В = 6,4 Г2 с Ц,с с ц,с с ц,с (минимальная колебательность), 4 - В = 8г2 !,pas,c Re~Rb fee 2 1+рС Rji fej Ri RbRe Rb+Re (1-237) 12 tI 6-b = (t,c с (симметричный оптимум); 5 - В = 16 Г2 . ре частоты вращения отсутствуют дополнительные инерционности, система регулирования частоты вращения хорошо описывается уравнением четвертого порядка. В этом случае эквивалентная малая постоянная времени контура частоты вращения Г,.е=2Г . Частотные и переходные характеристики для данной системы несколько отличаются от системы третьего порядка. Однако для практических целей можно пользоваться семействами кривых, приведенными на рис. 1-209--1-213. Отметим, что для данного случая настройка контура частоты вращения по симметричному оптимуму соответствует настройке на минимальную колебательность. ГэмСеФр (l+pCR,){l+Tp) Амплитудно-частотные характеристики разомкнутого контура частоты вращения представлены на рис. 1-225. Здесь приняты следующие обозначения: Параметры регулятора частоты, вращения следует выбирать из условия постоян- ства частоты среза Юср -Тп. и неизмен- ной длины участка ЛАЧХ 20 дБ/дек в окрестности частоты среза для возможного диапазона изменения 1<у<оо, т.е. CRRb 1 «ср - RM 1 R kcRs feT Ri ПшСеФ Ri 2Т
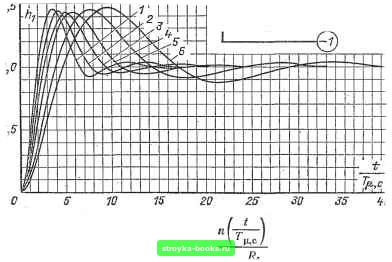 Рис. 1-221. Переходная характеристика ftj = при = const, Г5! = 4Гд. ""/sfee Обозначения - см. рис. 1-220, [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [ 56 ] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] 0.0012 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||