
|
|
|
Главная Развитие народного хозяйства [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [ 50 ] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] 4170 Вхсд2 II < 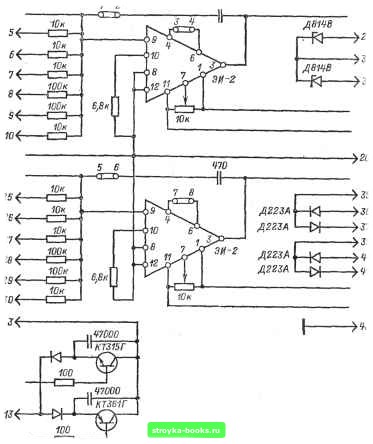 -П Вьтод1 16 +12,ВВ 38 Выход г ->w -цев Рис. 1-184. Ячейка операционных усилителей У2-АИ. жения, которые были изложены при рассмотрении ПД-регулятора. Возможен вариант ПИД-рег5лятора с разделительным усилителем в цени обратной связи регулятора (рис. 1-183,6). Такое включение применяется, когда невозможно удовлетворить неравенство Ri3>R2. Выходное напряжение регулятора поступает на эмиттер транзистора и далее в цепь обратной связи с запаздыванием согласно передаточной функции » l + pR.C + Здесь это напряжение дифференцируется на емкости Ci и образует ток обратной связи, протекающий но резистору R,. Вследствие преобразования сопротивлений время изодрома TiiRiCi, а коэффициент пропорционального усиления kjiivRi/Rc. Передаточная функция такого ПИД-регулятора с «активной обратной связью» имеет вид: Rj (l+pRjCyd-lpRC) Яо pRiCi В целях демпфирования собственных колебаний усилителя возможно включение в поперечную ветвь резистора R. Помимо рассмотренных регуляторов в практике электропривода находят применение и другие более сложные регуляторы. Краткая характеристика аналоговых систем регуляторов, выпускаемых электропромышленностью. Электропромышленностью создано несколько аналоговых систем регуляторов. Первая из них была создана ВНИИЭлектроприводом в 1960-х годах (система УБСР), которая нашла широкое применение в системах автоматизированного электропривода. Основными элементами аналоговых регуляторов этой серии являлись операционные усилители с модуляцией и демодуляцией сигнала. В качестве примера можно указать операционный усилитель УПТ-2. Его краткие характеристики: коэффициент усиления /г=600-1000, входное сопротивление 100 кОм, сопротивление нагрузки 4,8 кОм, полоса пропускания 30 Гц, высокочастотная пульсация выходного напряжения 17о- НИИХЭМЗ разработана аналоговая система регуляторов, где используются опе-р ацйонные усилители с непосредственным усилением постоянного напряжения. Этот тип операционных усилителей проще по конструкции, обладает малой инерционностью и не имеет собственных пульсаций на выходе, но имеет повышенный температурный дрейф. Примером такого усилителя может быть усилитель ЯФХ-0001. Его краткие характеристики: коэффициент усиления fe= =5000, входное сопротивление 10 кОм, сопротивление нагрузки 1,5 кОм. Развитие микроэлектроники в последние годы создало предпосылки для широкого внедрения интегральных микросхем в системы управления электроприводом. Институтом ВНИИЭлектропривод и НИИХЭМЗ разработана серия аналоговых элементов УБСР-АИ с широким применением интегральных микросхем, В эту серию входят следующие элементы: операционный усилитель, задатчик интенсивности, ячейка связи к усилителям, фазоч5тзствительный выпрямитель, датчики тока и напряжения, нуль-индикатор, ячейки нелинейных преобразователей, выделения модуля, умножения-деления, бесконтактных ключей, а также источники питания для аналоговых элементов, ячейки задания скорости, интегрозапомина-ющее устройство и т. п. В этой серии используются интегральные операционные усилители. На рис. 1-184 приведена принципиальная схема ячейки операционных усилителей У2-АИ, входящих в состав УБСР-АИ разработки ВНИИЭлектропривод, выполненная на базе интегральных операционных усилителей К1УТ402А. Различные тины таких усилителей имеют следующие характеристики: коэффициент усиления fe=(40-200)105, лоса пропускания в режиме с единичной обратной связью и элементами коррекции 5- 100 кГц, входное сопротивление 100- 500 кОм, сопротивление нагрузки 2 кОм. Чтобы добиться минимального дрейфа нуля, их выполняют симметричными по входу и при использовании в режиме регулятора второй вход (неинвертнрующий) соединяют с нулевой шиной. На частотах входного сигнала, близких к нулю, напряжения Uy. и t/вык находятся в противофазе. С возрастанием частоты сдвиг фаз между входным и выходным напряжением возрастает, н при некоторой частоте полный сдвиг фаз становится 360°, и отрицательная при нулевой частоте обратная связь становится положительной, усилитель самовозбуждается. Для устранения самовозбуждения интегральные усилители снабжаются дополнительными корректирующими iC-цепочками. Эти цепи вместе с самой интегральной микросхемой операционного усилителя конструктивно размещаются в субблоке ЭИ-2 (рис. 1-185), который входит в состав ячейки У2-АИ. На базе серии УБСР - АИ электропромышленностью создана большая номенклатура комплектных электроприводов. Институтом ВНИПИ «Тянпромэлектропроект» совместно с ВНИИЭлектропривод разработана унифицированная блочная система дискретных регуляторов на интегральных элементах (УБСР-ДИ). На базе систем 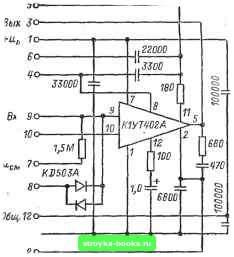 -Ип по- Рис. 1-185. Элемент интегральный ЭИ-2 (интегральный операционный усилитель с цепями коррекции). УБСР-ДИ и УБСР-АИ представляется возможным реализовать цифровые системы регулирования скорости, положения и прочие цифровые системы автоматики. В данном параграфе рассмотрены только цифровые системы регулирования частоты вращения. 1-41. ПРИНЦИПЫ ПОСТРОЕНИЯ СИСТЕМ ПОДЧИНЕННОГО РЕГУЛИРОВАНИЯ Системы подчиненного регулирования сочетают в себе достоинства методов последовательной коррекции с возможностью ограничения координат движения, осуществляемых с помощью каскадного включения регуляторов так, что выходное напряяенне предыдущего регулятора является заданием для последующего регулятора. Под координатами движения здесь понимают выходные значения звеньев системы регулирования, изменяющиеся во времени, например п, /, Ющ, t/pc ИТ. д. Ограничение или формирование по определенному закону выходного напряжения предыдущего регулятора вызывает ограничение или изменение по определенному закону координаты, регулируемой последующим регулятором. Таким образом, необходимое ограничение нескольких координат движения достигается с помощью многоконтурной системы регулирования. Число последовательно включенных регуляторов при подчиненном регулировании равно числу регулируемых координат движения. Стру1стурная схема трехконтурной системы подчиненного регулирования представлена на рис. 1-186. Каждый контур системы регулирования имеет регулятор и объект Нрз(р)- Н2К Ирг(р) *<2>- Нр1(р) Hoi(p) Ног(р) Рис. 1-186. Структурная схема трехконтурной системы подчиненного .регулирования. регулирования. Объект регулирования включает в себя выходное звено данного контура, т. е. собственно объект, и замкнутый контур регулирования, внутренний по отношению к данному контуру. Регулирование производится путем последовательной оптимизации контуров, начиная с внутреннего. На вход каждого регулятора подаются сигналы заданного и действительного значений регулируемого параметра, причем предыдущий регулятор вырабатывает сигнал задания для последующего регулятора. Способ подчиненного регулирования позволяет легко вводить ограничения параметров, а также относительно просто осуществлять расчет и реализацию систем. В качестве регуляторов, обеспечивающих реализацию необходимых корректирующих звеньев, применяют аналоговые операционные усилители. Анализ структур схем объектов управления показывает, что они имеют вид цепочек последовательно соединенных звеньев. Наиболее распространенными видами звеньев являются инерционные, интегрирующие и пропорциональные. Регулятор любого контура представляет собой в большинстве случаев последовательное корректирующее звено. Передаточная функция регулятора определяется структурой и параметрами соответствующего звена объекта регулирования, а также критерием оптимизации этого контура. 1-42. МЕТОДЫ ОПТИМИЗАЦИИ КОНТУРОВ РЕГУЛИРОВАНИЯ Каждый внутренний контур регулирования подлежит оптимизации, т. е. такому выбору параметров регулятора, при котором удовлетворяется заданное качество регулирования. Под заданным качеством регулирования понимается переходный процесс нри ступенчатом входном сигнале, характеризующийся определенным перерегулированием и быстродействием. Наибольшее распространение получили два критерия оптимизации: модульный и симметричный оптимумы. Модульный оптимум. Методику выбора и настройки регулятора рассмотрим сначала на примере простейшего случая (рис. 1-187), когда объект регулирования контура содержит два инерционных звена: k,/{Top + + 1) и fe2/(7nP-l-l), причем Го»7.Малая постоянная времени характеризует уррг вень помехоустойчивости системы регулирования. Рассматриваемый контур требуется настроить так, чтобы входной ступенчатый сигнал отрабатывался без ошибок с максимально допустимым быстродействием, причем перерегулирование выходной величины не превышало 87о.
Рнс. 1-187. Структурная схема контура с одним интегральным звеном. Для астатического регулирования в рассматриваемом контуре должно быть хотя бы одно интегральное звено, которое может принадлежать объекту или контурному регулятору. Для обеспечения быстродействия необходимо скомпенсировать большую постоянную времени объекта То. В этом случае контурный регулятор выбирается с передаточной функцией {Тр+ + \) /Ар, причем 7= Го. Передаточная функция замкнутого контура регулирования прн этом имеет вид: Bp? + Bp-1-1 где £ = Величина В в дальнейшем именуется эквивалентной постоянной интегрирования контурного регулятора. Контур представляет собой систему второго порядка, важнейшей характеристикой которой является коэффициент относительного демпфирования где Р - коэффициент при р; циент при р. а - коэффи- При g = где Во - оптимальная эквивалентная носто-янная интегрирования. [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [ 50 ] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] 0.0016 |
|||||||||||||||||||||||||