
|
|
|
Главная Развитие народного хозяйства [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [ 48 ] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] ем обмоток статора двигателя М постоянным током от отдельного выпрямителя и с фазовым регулированием инверторов UZ1 и UZ2. Передаваемая через воздушный зазор в ротор активная мощность Рб может быть разложена на механическую мощность, передаваемую на вал двигателя, и на электрическую мощность (так называемую мощность скольжения). Пренебрегая потерями в стали и меди статора, можно пользоваться соотношениями (при различных законах изменения момента в зависимости от скольжения S), приведенными в табл. 1-34. При проектировании вентильных каскадов следует обратить внимание на возможность возникновения колебаний момента из-за того, что ток ротора имеет несинусоидальную форму кривой. Если эти колебания совпадают с собственной частотой колебания механической системы ротора двигателя и приводимых их механических масс, то появляются разонансные явления, предъявляющие недопустимые требования к валу двигателя и редуктору. Система автоматического регулирования должна исключать работу на частотах вращения, при которых наступает разоианс. 1-39. ДВИГАТЕЛИ ДВОЙНОГО ПИТАНИЯ В § 1-38 были рассмотрены вентильные каскады, в которых регулирование производилось вниз относительно синхронной частоты вращения. Для двухзонного регулирования асинхронного двигателя с фазным ротором необходимо связать ротор асинхронного двигателя с непосредственным преобразователем частоты, который был рассмотрен в § 1-36. Непосредственный преобразователь частоты (НПЧ) дает возможность производить двунаправленную передачу энергии, т. е. дает возможность не только передавать энергию скольжения двигателя в сеть, но и преобразовывать энергию сети в энергию возбуждения ротора двигателя и осуществлять этим работу со сверхсинхронной скоростью. Такое включение преобразователя имеет известные энергетические преимущества: а) для механизмов, не требующих широких пределов регулирования частоты вращения, установленная мощность НПЧ, пропорциональная скольжению, оказывается значительно меньшей, чем при применении обычного частотного регулирования; б) соответствующим изменением значения и фазы напряжения на кольцах ротора обеспечивается регулирование реактивной мощности статорной цепи, т. е. возможно достижение высокого коэффициента мощности; в) коммутация тиристоров НПЧ естественная, что повышает надежность преобразователя. Система двигателей двойного питания состоит: из асинхронного двигателя с фаз- ным ротором с тремя или шестью контактными кольцами; для питания ротора двигателя; системы автоматического регулирования, состоящей из датчиков, регуляторов, счетно-решающих устройств, и системы импульсно-фазового управления. У систем с машиной двойного питания возможны два режима работы - синхронный и асинхронный. В первом релшме для регулирования частоты вращения используется независимый задатчик частоты напряжения в цепи ротора (в установившемся режиме частота вращения зависит только от частоты питающей сети и частоты напряжения, подводимого к ротору). Значение напряжения на кольцах ротора определяет реактивную мощность машины. Во втором режиме частота вращения, подводимого к кольцам ротора, является функцией частоты сети и частоты вращения ротора, т. е. система замкнута по частоте вращения. Угловая частота вращения ротора машины зависит от момента на валу и может с помощью системы автоматического регулирования поддерживаться с тем или иным ста-тизмом. Такой режим машины двойного питания имеет несколько лучшие динамические характеристики. Для машины двойного питания, работающей Б асинхронном режиме, при соответствующих коэффициентах регулирования момент на валу и реаш-ивная мощность могут с достаточной степенью точности определяться выражениями (1-188) где S - скольжение; U - напряжение статора; x - реактивное сопротивление статорной обмотки; ао, aj, Ро - коэффициенты регулирования: Ро - для регулирования реактивной мощности; ао - частоты вращения; а, - жесткости Н характеристики М (s): „ дМ и Из (1-188) следует, что при регулировании частоты вращения (ao=var; s=var) реактивная мощность не меняется, а изменение Ро не влияет на изменение s. На рис. 1-175 дана скелетная схема регулируемого электропривода по системе двигателя двойного питания. Асинхронный двигатель с фазным ротором М получает питание от сети 50 Гц через выключатель Q1. Ротор двигателя выполнен с шестью контактными кольцами, причем начало н конец каждой из трех обмоток ротора выведен на два кольца. Непосредственный преобразователь частоты выполнен в виде трех реверсивных преобразователей по встречно-нараллельной схеме с раздельным управлением, причем каждый из преобразователей выполнен с однофазным выходом, питающим отдельную обмотку ротора, например преобразователь 50 Гц en i \ 50 Га 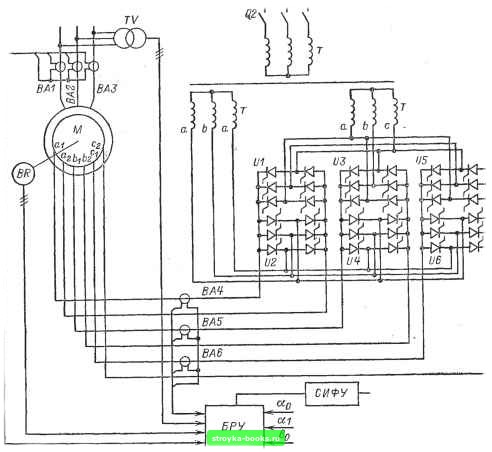 К управляюш,им электродам тирис-торов мостов U1-U6 Рис. 1-175. Схема электропривода с двигателем двойного питания. U1-U2 питает обмотку ротора щ-(Ц. Изолированная нагрузка каждого преобразователя дает возможность обходиться одним силовым трехфазным трехобмоточным трансформатором. Каждый из трех встречно-параллельных реверсивных преобразователей работает с раздельным управлением, применение совместного управления нежелательно из-за необходимости вводить уравнительные реакторы, которые увеличивают внутреннее сопротивление преобразователей. В блок решающего устройства БРУ вводятся следующие величины: ток статора от датчиков тока ВА1, ВА2 и ВАЗ, ток ротора от датчиков ВА4, ВА5 и ВА6, напряжение статора от трансформатора напряжения TV к частота вращения двигателя от датчика BR. Датчик BR выполнен как тахогенератор переменного тока н при равенстве числа пар полюсов BR и М частота его напряжения равна fi{l-S). Вычитанием из частоты сети частоты датчика можно получить частоту ротора fs и скольжение sfz/f,. В блоке решающего устройства путем применения различных решающих устройств получают действительные значения частоты статора, ротора, момента, реактивной мощности и жесткости. Эти величины .сравниваются с исходными значениями Оо, oi и Ро- Выход блока БРУ подается на вход системы импульсно-фазового управления СИФУ, которая управляет преобразователем частоты. Пуск двигателя М осуществляется аналогично пуску в вентильных каскадах. Двигателю двойного питания присущи следующие нолохительные качества: а) двухзонное регулирование частоты вращения уменьшает вдвое установленную мощность преобразователя частоты; б) номинальная мощность двигателя при синхронной частоте вращения меньше, чем при максимальной частоте вращения; в) система с двигателем двойного питания имеет высокие промышленные показатели - к. п. д. и cos ф. К недостатку системы с двигателем двойного питания следует отнести ограниченные пределы регулирования частоты вращения, которые не превышают 1,85 : 1. Ж. УПРАВЛЕНИЕ ЭЛЕКТРОПРИВОДАМИ С ПРИМЕНЕНИЕМ УНИФИЦИРОВАННЫХ СИСТЕМ РЕГУЛЯТОРОВ 1-40. АНАЛОГОВЫЕ СИСТЕМЫ РЕГУЛЯТОРОВ Развитие теории и практики систем регулирования электропривода, а также электроники привели к созданию аналоговых систем регуляторов, обеспечивающих высокое быстродействие и .очность работы электроприводов. В основе аналоговой системы регуляторов находится операционный усилитель. Операционный усилитель - это усилитель постоянного тока с очень большими коэффициентом усиления по напряжению и входным сопротивлением и малым выходным сопротивлением. Применение операционного усилителя в качестве регулятора определяется возможностью реализации с высокой точностью желаемых передаточных функций и арифметических действий с входными сигналами, а именно: суммирования, умножения и деления сигналов, а также возможностью выполнения различных функциональных устройств. Прн использовании операционного усилителя в качестве регулятора на его входе происходит сравнение сигналов задания и фактического значения регулируемой величины в виде сигналов тока, пропорциональных входным напряжениям регулятора Ui, U2, Un- Зависимость между входным и выходным напряжениями для структурной схемы аналогового регулятора на рнс. 1-176 имеет вид: и, X , (1-190) вх o,i 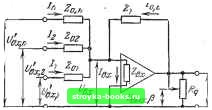 Рис. 1-176. Структурная схема аналогового регулятора на базе операционного уснли- где и -количество входов регулятора; Ui- напряжение на t-м входе регулятора; 2вх- комплексное входное сопротивление операционного усилителя; k - комплексный коэффициент усиления Операционного усилителя; Zi - комплексное сопротивление в цепи обратной связи операционного усилителя; Zo.t •- комплексное сопротивление на t-M входе регулятора. 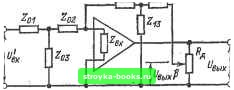 Рис. 1-177. Регулятор с Т-образными звеньями на входе и в цепн обратной связи. Влиянием выходного сопротивления операционного усилителя можно пренебречь. В практических расчетах часто полагают, что \k\co, тогда (1-190) существенно упрощается Ul. (1-191) В зависимости от характера сопротивлений Zo,,- и Zi с помощью операционного усилителя могут быть реализованы различные регуляторы. Нередко входные цепи и цепь обратной связи содержат Т-образные звенья и структурная схема регулятора может быть представлена в более общем виде, как на рнс. 1-177. Передаточная функция такого регулятора - £/вых(р). Zii+Zi + Zii Zi 2oi + ог + 1 Z(i\ Z02 +lz,,+z,,+]x \ 13 / Zai+Zfi теля. Zn ~b Zg ,f?03 (1-192) [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [ 48 ] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] 0.0014 |