
|
|
|
Главная Развитие народного хозяйства [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [ 46 ] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] Как и в реверсивном управляемом выпрямителе постоянного тока, возможна одновременная работа групп £ и £/2 в режиме совместного управления. В этом случае должно быть выдержано условие а,-Наг =180°, где d - угол открывания тиристоров группы U1; Иг - угол открывания тиристоров группы 1)2. Хотя средние значения выходного напряжения двух групп равны, мгновенные значения напряжений различаются, что вызывает уравнительный ток. Для ограничения уравнительных токов служат уравнительные реакторы TAV1 и TAV2. Возможна также работа в системе раздельного управления аналогично реверсивному выпрямителю постоянного тока. Для питания трехфазного двигателя переменного тока на каждую фазу нужен один однофазный преобразователь. Схема разделительного трансформатора в большей степени влияет на параметры преобразователя. В простейшем случае трансформатор имеет одну вторичную трехфазную обмотку, от которой получают питание все шесть шестифазных мостов. Возможно выполнение схемы, при котором трансформатор имеет две вторичные трехфазные обмотки, от одной из которых производится питание трех мостов преобразователя, образующих «положительные» полуволны (Ul) тока нагрузки, а от другой «отрицательные» (U2). Возможно выполнение схемы преобразователя с трансформатором, имеющим шесть вторичных трехфазных об-, моток по числу мостов схемы. Такая схема обеспечивает лучшие показатели преобразователя в отношении уравнительных токов и форм кривой выходного напряжения. Усложнение конструкции трансформатора И увеличение примерно на 20% его типовой мощности компенсируются уменьшением установленной мощности ограничивающих реакторов. К положительным качествам низкочастотных преобразователей - цикло-конверторов - следует отнести: хорошую форму кривой напряжения, простой обмен активной и реактивной энергией между источником и двигателем, а также регулирование частоты и иапрякийя в широких Пределах, так как частота может подниматься почти от Нуля. Мощность электропривода может быть очень большой (6000 кВт). Недостатки циклоконверторов заключаются в ограниченном верхнем пределе выходной частоты, в пониженном cos ф, а также в возможности появления Постоянной составляющей тока в том случае, когда сформированные положительные и отрицательные полупериоды не являются полностью идентичными. Кроме того, применение циклоконверторов может привести к искажению формы кривой напряжения питающей сети. Если отношение частоты питания цик-локонвертора к выходной частоте является целым числом, тиристоры не нагружаются равномерно. 1-37. ВЕНТИЛЬНЫЕ ДВИГАТЕЛИ Под вентильными двигателями понимают электропривод с синхронным двигателем и инвертором, в котором управление инвертором осуществляется в функции угла поворота ротора двигателя. Известны следующие две основные группы электроприводов с вентильным двигателем: а) вентильный двигатель с преобразователем частоты со звеном постоянного тока; б) вентильный двигатель с непосредст-в.еиным преобразователем частоты. Вентильные двигатели с преобразователем частоты со звеном постоянного тока. Рассмотренные в § 1-36 частотно-управляемые электроприводы с асинхронными двигателями и с применением инверторов со звеном постоянного тока связаны с искусственной коммутацией тиристоров с помощью конденсаторов. Применение синхронного двигателя вместо асинхронного дает возмоаность осуществить так называемый вентильный двигатель, в котором управление инвертором осуществляется от двигателя, причем включение очередного тиристора инвертора осуществляется в функции угла поворота ротора двигателя, а выключение предыдущего тиристора осуществляется за счет опережающей э. д. с. синхронного двигателя. Инвертор может выполняться как инвертор напряжения и как инвертор тока. Вентильный двигатель с инвертором тока имеет некоторые преимущества по сравнению с инвертором напряжения. Наличие большого дросселя в звене постоянного тока дает возможность получить напряжение на зажимах двигателя независимо от формы напряжения в промежуточной цепи. Ток в течение процесса коммутации остается Практически постоянным. Кроме того, инвертор тока дает возможность легко осуществить рекуперативное торможение прн сохранении постоянства направления тока путем изменения полярности напряжения в Промежуточной цепи. Для повышения надежности вентильного двигателя и для достижения высоких частот вращения желательно осуществить бесщеточное возбуждение двигателя с применением в качестве возбудителя вращаю-ш,ейся против поля асинхронной машины, подающей на обмотку возбуждения двигателя выпрямленный ток через вращающиеся имеете с ротором синхронного двигателя диоды. Применение бесщеточного возбуждения двигателя дает возможность повысить верхний предел частоты вращения (до 4500-6000 об/мин). На схеме вентильного двигателя (рис. 1-171) изображен синхронный двигатель Ml с бесщеточныМ возбуждением. В качестве возбудителя применяется асинхронная машина ME с фазным ротором, которая через выпрямительный МОСТ U2 подает ток в обмотку возбуждения двигателя Ml. Поскольку ма); 50Гц 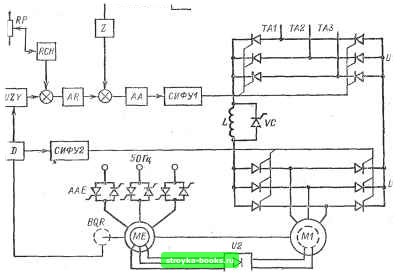 Рис. Ы71. Схема вентильного двигателя с инвертором тока и бесщеточным возбуждением синхронного двигателя. шина ME находится на одном валу со статором синхронной машины Ml, а выпрямительный мост U2 вращается вместе с ротором машины Ml, электрическая связь между обмотками ротора ME и обмоткой возбуждения Ml может осуществляться без щеток и колец, например провода, идущие от ротора к выпрямительному мосту, могут располагаться в полом валу, механически сочленяющем машину Ml и ME. Неподвижный статор машины ME по учает питание от сети переменного тока через регулятор тока возбуждения ААЕ, представляющий собой три пары встречно-параллельно включенных тиристоров, с фазовым управлением. Регулятор ААЕ может в свою очередь быть включенным в систему автоматического регулирования, изменяющую ток возбуждения по различным законам, например можно изменять ток возбуждения пропорционально току статора двигателя Ml. Преобразователь частоты, от которого получает питание синхронный двигатель Ml, состоит из сетевого преобразователя UI, сглаживающего дросселя L в промежуточном звене постоянного то..а, преобразователя со стороны машины UZ и тиристора реактивного тока VC. Сетевой преобразователь U1 работает в режиме управляемого выпрямителя и подводит выпрямленное напряжение и потребляемую нз сети активную мощность к промежуточной цепи постоянного тока. Преобразователь со стороны машины работает как инвертори создает противона-пряжение постоянного тока. Возникающее на входе инвертора постоянное противона-пряжение при постоянном возбуждении двигателя Ml пропорционально частоте вращения Ml. Сглаживающий дроссель L в промеж5точной цепи постоянного тока воспринимает разность мгновенных значений напряжений, отдаваемых преобразователями со стороны сети и со стороны машины. При генераторном торможении привода направление потока энергии изменяется воздействием на узлы регулирования преобразователей со стороны сети и со стороны машины. Преобразователь со стороны машины работает как выпрямитель, а сетевой преобразователь работает в режиме инвертора, ведомого сетью. Энергия, которая поступает от машины, подводится обратно в питающую сеть. Как отмечалось выше, направление постоянного тока при этом не изменяется, а изменяется полярность напряжения в промежуточной цепи. Для изменения направления вращения двигателя необходимо изменить порядок следования импульсов зажигания тиристоров преобразователя UZ таким образом, чтобы изменилось направление вращающегося поля. Сочлененный с валом двигателя датчик положения полюсов BQR сигнализирует о положении полюсов двигателя и с помо- щыо логического устройства D выбирает, какие тиристоры преобразователя UZ должны быть включены системой импульсно-фазового управления СИФЬ2, чтобы образовать вращающий момент в необходимом направлении. Следует отметить, что синхронный двигатель, работающий с тактовыми импульсами, зависимыми от положения ротора, идентичен якорю машины постоянного тока с коллектором, и поэтому вентильный двигатель приобретает характеристику машины постоянного тока: устраняется присущая синхронной машине склонность к колебаниям и машина не опрокидывается при перегрузке. Это объясняется тем, что дальнейшее переключение вращающегося поля происходит только в том случае, если ротор передвинулся на определенный угол, в электрических градусах (при трехфазной мостовой схеме на 60°); асинхронный режим в этом случае невозможен. Машина только по своему устройству является синхронной машиной, а по принципу действия является машиной постоянного тока с электронным коллектором, в качестве которого служит инвертор UZ. Сигналы, получаемые от датчика положения полюсов ротора BQR, используются одновременно для восприятия действительного значения частоты вращения. Для этой цели они преобразуются в цифро-аналоговом преобразователе UZY в аналоговую величину действительной частоты вращения. Остальная часть системы автоматического регулирования соответствует такой же системе для машин постоянного тока, получающей питание от статического преобразователя. Регулятор частоты вращения AR получает задание от задающего потенциометра RP через задатчик интенсивности RCH. Регулятору AR подчинен контур регулирования тока, который состоит из трансформаторов тока TAt, ТА2, ТАЗ мостового выпрямителя U3, фильтра Z и регулятора тока АА. Выходной сигнал регулятора тока воздействует на систему импульсно-фазового управления СИФУ1, управляющую сетевым преобразователем U1 в функции тока. При частоте вращения, близкой к нулю, и низких частотах вращения, когда синхронная машина не может генерировать достаточно большое напрял?еиие, применяют перевод инвертора UZ в режи-М- принудительной коиденсагорной коммутации, что связано с усложнением силовой части UZ, или применяют периодический кратковременный перевод сетевого преобразователя U1 в режим инвертора, ведомого сетью. Ток в промежуточной цепи, а следовательно, и ток Б преобразователе UZ становится равным нулю, и после паузы около 10 мс сетевой преобразователь U1 снова переводится в режим управляемого выпрямителя и зажигаются следующие тиристоры преобразователя UZ. Этот процесс происходит 6 раз в течение одного периода частоты машины до тех пор, пока напряжение ма-.шины не станет достаточно большим, что-10-825 бы осуществлять коммутацию со стороны машины. Для уменьшения времени спадания тока до нуля дроссель L в звене постоянного тока шунтируют тиристором VC, включаемым в момент начала спадания тока. Датчик положения полюсов машины в большинстве случаев применяется фотоэлектронный. Вентильный двигатель в отличие от системы с машинами постоянного тока не имеет ограничений по частоте вращения и по мощности. Вентильные двигатели с непосредственным преобразователем частоты. В электроприводах, не требующих достижения высоких частот вращения, возможно применение вентильных двигателей с преобразователями частоты с непосредственной связью. Скелетная схема электропривода с вентильным двигателем с непосредственным преобразователем частоты изображена на рис. 1-172. Синхронный двигатель М получает питание от трехфазного непосредственного преобразователя частоты. Преобразователь получает питание от сети 50 Гц и состоит из шести трехфазных тиристорных мостов, включенных попарно по встречно-параллельной схеме U1-U6. Преобразователь U1 формирует положительный полупериод выходного тока, а преобразователь U2 - отрицательный полупериод выходного тока фазы А. Преобразователи работают с раздельным управлением, т. е. при формировании положительного полупериода выключен мост U2, а при формировании отрицательного полупериода мост U1. Мосты из и Ш, U5 и U6 работают аналогично, формируя выходные напряжения фазы В и С. Частота выходного напряжения может изменяться от нуля до 16 Гц. Датчик положения полюсной системы BQ выполнен в виде вспомогательной асинхронной машины с фазным ротором с числом пар полюсов, равным числу пар полюсов двигателя М. Статор датчика BQ получает питание от сети 50 Гц, с его ротора снимается напряжение, модулированное частотой вращения двигателя М. В блюке решающего устройства (БРУ) с помощью демодуляции получают трехфазный задающий сигнал, управляющий по-фазно трехфазным преобразователем с непосредственной связью, в функции тока. С помощью функциональных нелинейных преобразователей ACV1 и ACV2 устанавливается значение угла ф менаду вектором линейной нагрузки тока статора и положением полюсов ротора и тока возбуждения /в в зависимости от заданной амплитуды статорного тока 1т, чтобы установка работала с со8ф=1. Сигнал нелинейного преобразователя ACV1 вводится в БРУ, а сигнал ACV2 подводится к системе импульсно-фазового управления СИФУ2 преобразователя U7, питающего возбуждение двигателя. Выходной сигнал БРУ является задающим сигналом регулятора тока АА и подается на узел сравнения этого регулятора. На этот л{е узел сравнения подается сигнал обратной связи от .датчика тока ста- [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [ 46 ] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] 0.0012 |