
|
|
|
Главная Развитие народного хозяйства [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [ 21 ] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] может применяться как измерительный трансформатор постоянного тока, а прн наличии ряда обмоток управления - как суммирующий МУ. 2. Однополупериодный МУ (рис. 1-93) является составным элементом более сложных схем однофазных и трехфазных МУ с самонасыщением. Состоит из одного сердечника с рабочей и управляющей обмотками и рабочей цепн с вентилем н нагрузкой (рнс. 1-93, а). Благодаря вентилю ток нагрузки всегда содержит постоянную составляющую. В течение отрицательного полупериода действует только цепь управления и поток в сердечгшке устанавливается только под воздействием напряжения на обмотке управления. Это позволяет получить значительно большее усиление по мощности и быстродействие по сравнению со схемой дросселя насыщения. Магнитное состояние сердечника с прямоугольной петлей гистерезиса (Br=Bs) при некотором установившемся сигнале управления изменяется по частному циклу (рис. 1-93, б). По мере увеличения напря-яения питания индукция возрастает до индукции насыщения +В. Напряжение питания практически полностью прикладывается к рабочей обмотке МУ (рис. 1-93, в). В момент насыщения сердечника (B=Bs) напряжение на рабочей обмотке МУ падает, почти все напряжение питания прикладывается к нагрузке и в рабочей цепи начинает протекать значительный ток. В начале отрицательного полупернода вентиль вапи-рается и отключает рабочую обмотку от напряжения питания. Индукция под воздействием тока управления, действующего в противоположном направлении по сравнению с рабочим током, начинает уменьшаться, стремясь к -В.,. В конце отряца-тельного полупериода индукция снова становится равной Во- С изменением полярности напряжения питания вентиль начинает проводить намагничивающий ток и действие схемы повторяется. Момент насыщения сердечника и, следовательно, угол проводимости а и среднее значение тока нагрузки определяются начальным значением индукции Во, а значит и соответствующим ему значением тока управления /у. При увеличении тока управления до значения, достаточного для полного размагничивания сер-дечнпка, ток нагрузки уменьшится до минимума. Для получения более удобной зависимости «вход-выход» применяется дополнительная обмотка управления (обмотка смещения), в которую подается ток соответствующей полярности. В этом случае размагничивание сердечника в управляющий полупериод будет определяться разностью токов смещения и управления. 3. Однофазный МУ (рис. 1-94) состоит из двух однополупериодных МУ с самонасыщением, каждый из которых работает как управляемый выпрямитель, питающий нагрузку в течение своего полупернода. В зависимости от выполняемых функций МУ его характеристики, в том числе и ко- 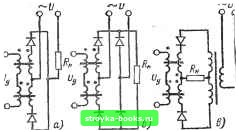 Рис- 1-94. Однофазный усилитель. а - с выходом на переменном токе; б и в - с выходом на постоянном токе. эффициент усиления, могут быть изменены введением внешней положительной или отрицательной обратной связи по току или по напряжению. 4. Трехфазный МУ (рис. 1-95) позволяет обеспечить равномерную нагрузку фаз питающей сети, увеличить выходную мощность в единице объема и получить малый коэффициент пульсации постоянного тока. МУ с выходом на постоянном токе при наличии нагрузки с большой индуктивностью выполняются по схеме с вынесенным выпрямительным мостом (рис. 1-95, я) или по мостовой схеме с шунтирующим обратным ди- 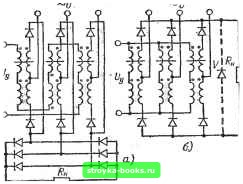 Рис. 1-95. Трехфазный усилитель. одом (рис. 1-95,6). В этом случае разряд накопленной электромагнитной энергии происходит через выпрямители, не влияя на работу дросселей МУ. Следует отметить, что в трехфазных МУ в каждой паре обмоток управления, относящихся к одной фазе, индуктируются четные гармоники э. д. с, сдвинутые по фазе на 2я/3 и 4я/3 относительно этих же гармоник э. д. с. других пар обмоток управления. Поэтому при последОВательном соединении всех обмоток управления (рис. 1-95, а) эти гармоники взаимно компенсируются и усилитель практически работает в режиме подавленных четных гармоник тока. Такой режим приводит к существенной нелинейности зависимости «вход - выход». Основное достоинство последовательного соединения обмоток управления заключается в том, что конструктивно они могут быть выполнены в виде одной общей обмотки, охватывающей все сердечникп. При параллельном соединении отдельных пар обмоток управления (рис. 1-95, б) четные гармоники тока свободно циркулируют по этим обмоткам независимо от сопротивления входной цепи. Это улучшает линейность характеристики «вход - выход». Однако прн параллельном соединении обмоток управления увеличивается инерционность МУ. 5. Реверсивный МУ (рис. 1-96). В электроприводе наибольшее распространение получили мостовые схемы реверсивных МУ, обеспечивающие повышенный к. п. д. по сравнению с другими известными реверсивными МУ. В основу этих усилителей положен MocTj плечами которого являются нере-  Рис. 1-96. Реверсивный усилитель.  Рис. 1-97. Типичные характеристики «вход-выход». л -дросселя насыщения: б -МУ с самонасыше-нием; е - МУ с цепью смещения; г - реверсивного МУ. верспвпые однофазные или трехфазные МУ с выходом на постоянном токе, включенпие на об1цую нагрузку, и балластный резистор, причем сопротивление его выбирается примерно равным по значению сопротивлению нагрузки. При работе уси.пнтеля с сигналом на входе ток h (рис. 1-97) одного нереверсивного МУ растет, а ток h другого уменьшается и на выходе устанавливается соответствующий ток нагрузки /„, мгновенное значение которого 1н=й-к. Прн отсутствии сигнала на входе ii=i2 и ток на выходе равен нулю. Ток в балластном резисторе Яъ мало зависит от сигнала иа входе, его мгновенное значение ie-h-i-ii. Коэффициент-полезного действия мостовых усилителей с учетом потерь в балластном резисторе, вентилях и дросселях составляет 30-40%. На рис. 1-96 показана схема однофазного реверсивного усилителя, выполненного на двух нереверсивных МУ. Нереверсивные МУ, входящие в состав усилителя, имеют расщепленные рабочие обмотки 1а и 16, 2а и 26 и т. д. и соответственно но две цени питания и выпрямителей. Мостовая схема составлена включением выходных ценен нереверсивных МУ в противоположные плечи моста. 1-25. НЕКОТОРЫЕ ВОПРОСЫ ПРОЕКТИРОВАНИЯ ЭЛЕКТРОПРИВОДОВ С МАГНИТНЫМИ УСИЛИТЕЛЯМИ Проектирование электроприводов с магнитными усилителями включает следующие этапы: определение параметров нагрузки и выбор схемы МУ; анализ влияния формы кривой выходного напряжения на работу нагрузки; анализ влияния электрических характеристик нагрузки на работу выходного каскада; расчет статического режима работы привода, из которого определяется требуемый коэффициент усиления МУ и анализ динамических характеристик МУ. При использовании МУ для питания разного рода нагрузок (обмотки возбуждения генераторов и двигателей, электромагнитные муфты, электромагниты, управляющие обмотки более мощных МУ) необходимо учитывать взаимодействие усилителя и нагрузки. Обычными мерами по устранению влияния нагрузки на работу МУ являются: при индуктивной нагрузке - применение схем с вынесенными выпрямителями или включе1Шями обратного вентиля, шунтирующего нагрузку (рис. 1-95); нри питании утгравляющих обмоток более мощного МУ - включеннЕ параллельно нагрузке развязывающих конденсаторов. Эффективность однофазных схем МУ с выходом на постоянном токе до некоторой степени снижается из-за большого значения отношения максимального напряжения усилителя к его среднему значению. При больших мощностях выхода желательно применять трехфазную схему, так как в ней указанное отношение и относительное значение переменных составляющих меньше. В трехфазной схеме при той же самой мощности выхода потери J3 самом усилителе и нагрев нагрузки меньше. Если требуется получить более высокий коэффициент усиления, чем тот, который возможен для одного усилителя, то схемы могут быть соединены в каскад. Иногда целесообразно увеличить число каскадов МУ для снижения его инерционности. Кроме того для повышения быстродействия усилителя часто в схемах предварительных и суммирующих МУ предусматривается 1Ю-выщенная частота питания 400, 1200 Гц. 1-26. ПРИМЕРЫ ПРИМЕНЕНИЯ МАГНИТНЫХ УСИЛИТЕЛЕЙ В ЭЛЕКТРОПРИВОДЕ Регулирование частоты вращения асинхронного двигателя (рис. 1-98). Управление электроприводом осуществляется от задающего потенциометра RP, на который подается выпрямленное напряжение от силовой сети. В зависимостп от требований технологического процесса цепи управления мо-гзТ быть выполнены и на базе других устройств, например источника стабильного напряжения; задающего сельсина, работающего в трансформаторном режиме. Для получения жесгких механических характеристик электропривода на вход МУ подают сигналы обратных связей: положительной по току (обмотка еуз) и отрицательной по на-  пряжению (обмотка ЕУ4). Кроме того, усилитель имеет узел смещения, необходимый для выбора режима его работы (обмотка W2). Регулирование возбуждения машин постоянного тока (рис. 1-99). Основная часть .мощности, требуемая для возбуждения машины, берется от постороннего источника, а МУ используется лишь для корректирова- 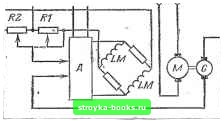 Рис, 1-98. Регулпровагаге частоты враще-нпя асинхронного двигателя трехфазным магнитным усилителем в цепи статора. Рис. 1-99. Регулирование частоты вращения двигателя постоянного тока с магнитным усилителем А в цепи возбуждения. ния тока возбуждения. Для этой цели две полуобмотки возбуждения LM двигателя включены по мостовой схеме, а шуитовой регулятор Rt и задающий потенциометр R2 механически связаны. Обратная связь по частоте вращения подается от тахогенера-тора G в общую обмотку управления МУ. В простейшем регуляторе может быть применен однофазный нереверсивный МУ. Однако применение реверсивного МУ обеспечит лучшее быстродействие привода как при набросе, так и при сбросе нагрузки. Датчики тока. В системах автоматического регулирования промышленных установок для измерения постоянных токов и для осуществления обратных связей по току в качестве датчиков тока можно применить дроссели насыщения (рнс. 1-100), которые конструктивно отличаются от обычных МУ тем, что их обмотка управления выполнена в виде одного витка (шины), по которому протекает измеряемый постоянный ток. Такая конструкция датчика дает возможность преобразовать значительные токи в более доступные и удобные для измерения величины без больших потерь и позволяет изолировать цепн измерения от главных цепей. Эти МУ работают в режиме вынужденного намагничивания, поэтому выпрямленный ток на их выходе повторяет без запаздывания все изменения измеряемого тока. Пределы измерения датчика определяются линейным участком характеристики «вход - выход», для которого справедливо равенство м. д. с, создаваемых токами рабочей обмотки и обмотки управления. Однофазный датчик (рис. 1-100, а), обычно называемый трансформатором постоянного тока, широко применяется в измерительной технике для измерения больших значений постоянного тока. В системах [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [ 21 ] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] 0.0014 |