
|
|
|
Главная Развитие народного хозяйства [0] [ 1 ] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] Таблица 1-1 Коэффициент трения некоторых материалов при наличии смазки между ними
Для подшипников качения во избежание громоздких расчетов обычно применяют это выражение при соответствующем эквивалентном коэффициенте трения, отнесенном к диаметру цапфы. Статический момент на оси цилиндра, катящегося по плоскости, определяется по формуле, НМ, сила сопротивления движению цилиндра, катящегося по плоскости, - по формуле, Н, .=. <... где Р - усилие прижатия цилиндра к плоскости, Н; f - коэффициент трения качения цилиндра по плоскости (табл. 1-2); D - диаметр цилиндра, мм. Приведение статических моментов. Статический момент на валу двигателя от статического тормозящего момента Мст, м на валу механизмов определяется по формуле • А1ст= . . (1-5) где,.»).~кп.д. редукторов; {-передаточное число от двигателя к машине. Если Мот, м - движущий (например, спуск груза), то Mrv = (1-6) где Г1„виж - к. п. д. редуктора при движущем статическом моменте. Если принять моменты от трения в редукторе, приведенные к валу двигателя, одинаковыми при равных абсолютных значениях движущего и тормозного статических моментов, т]движ может быть выражен через обычный к. п. д.; %виш - 2т1 -1 (1-7) При т)>0,5: Т1движ>0; Мст>0 получим тормозной (генераторный) режим двигателя (например, тормозной спуск груза), при 11<0,5; Г1лвиж<0; Мст<0 -двигательный режим двигателя (например, силовой спуск груза). Для винтовых и червячных передач при вычислении г)движ должна быть учтена величина т) для обратной передачи энергии через редуктор. Формулы для определения статического момента точны при установившейся скорости. При ускорении и замедлении привода формулы не учитывают добавочных потерь в энергии в передачах от передава-
§ 1-3] Расчет моментов инерции Таблица 1-3 Коэффициенты полезного действия механических передач
Примечание. При поиижениой нагрузке механической передачи уменьшенный к. п. д. берется по кривым рис. 1-2. Под относительной нагрузкой К понимается отношение действительного момента нагрузки к номинальному моменту передачи. емого через них динамического момента механизма. Обычно эти добавочные потери энергии в расчетах не учитывают. Коэффициенты полезного действия некоторых механических передач даны в табл. 1-3 и на рис. 1-1 и 1-2.  О t 12 IB го гч- 28apaS Рис. Ы. Кривые зависимости к. п. д. червячной передачи от угла подъема нарезки при условии, что червяк и колеса чугунные, необкатанные, смазанные (/); стальной червяк по бронзе фрезерованный, масляная ванна (2); конструкция тщательно выполнена в масляной ванне {3). 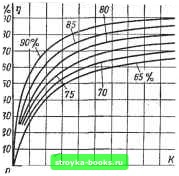 0,1 О/ 0,3 0,1 0,5 0,В 0,7 0,8 0,3 1,0 Рис. 1-2. Зависимость к. п. д. механизмов от относительной загрузки К- 1-3. РАСЧЕТ МОМЕНТОВ ИНЕРЦИИ Приведение моментов инерции вращающихся и поступательно движущихся масс элементов привода производится исходя из равенства значений кинетической энергии тела для действительной скорости его дви- 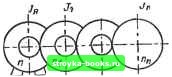 Рис. 1-3. Кинематическая схема редуктора. жеиия и при частоте вращения двигателя (рис. 1-3). Приведение моментов инерции при вращательном движении. Для двигателя с редуктором, состоящим из п пар зубчатых колес (рис. 1-3), момент инерции, приведенный к частоте вращения вала двигателя, определяется по формуле, кг-м. +...+ (1-8) где /я - суммарный момент инерции якоря (ротора) двигателя и деталей, непосредственно связанных с его валом (муфта, зубчатое колесо, тормозной шкив и т. д.), вращающихся с частотой вращения п, кг-м; /i> /2. .... - моменты инерции частей редуктора, вращающихся соответственно с частотами вращения ш, пг, .... Пп. кг-м; jj=n/ni; h=n/nz; inn/Пп - передаточные отношения от вала двигателя к соответствующему валу редуктора; п - частота вращения двигателя, об/мин; tii, т, п„ - частоты вращения зубчатых колес редуктора, об/мин, I--.I... Приведение моментов инерции при поступательном движении масс. Момент инерции, приведенный к валу вращения двигателя (рис. 1-4), определяется по формуле (1-9) (1-10)  Рис. 1-4. Кинематические схемы для поступательного и вращательного движения. а - горизонтальное поступательное движение; 6 - вертикальное поступательное движение. где /--Приведенный к валу вращения момент инерции, кг-м; /вр - суммарный момент инерции всех деталей, непосредственно связанных с валом вращения, кг-м; Шп - поступательно движущаяся масса, кг; £>б - диаметр барабана (или начальной окружности зубчатой передачи), м; v - ско рость поступательно движущихся масс, м/с; п - частота вращения вала, об/мин. 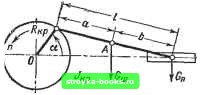 Рис. 1-5. Кинематическая схема кривошип-но-шатунного механизма. Приведение моментов инерции для кри-Бошипно-шатуниой передачи. Приведенный к валу кривощипа момент инерции (рис. 1-5) определяется по формуле (1-11) где /нр - суммарный момент инерции всех деталей, непосредственно связанных с валом кривошипа, кг-м; /ш.п - момент - инерции от шатуна, приведенный к валу кривовдипа, кг-м; /д -момент инерции от поступа-телт движущейся Macciji (ползун, шток, порщень и т. п.), кг-м. Момент инерции от шатуна находится по формуле ш.п ш "кр sin а -]--X sin 2а 1 + 1-] sincc -f -y-Jcosa cosa \ i J (1-12) Здесь первое слагаемое учитывает поступательное перемещение шатуна (его центра тяжести), а второе - вращательное движение (вокруг оси, проходящей через центр тяжести шатуна); Шш - масса шатуна, кг; ?кр - радиус кривошипа, м; а - угол поворота кривошипа; / - длина шатуна, м; а, 6-расстояния центра тяжести шатуна (точка А на рис. 1-5) до его осей поворота, м; 1ш - момент инерции шатуна при повороте относительно оси, проходящей через центр тяжести (на рис. 1-5 точка Л), кг-м В ряде случаев момент инерции от шатуна /ш,п относительно мал и его можно не учитывать. Приведенный момент инерции от поступательно движущейся массы находится из Еырагрения и = "икр sina-b sin 2а (1-13) где Шп - поступательно движущаяся масса, кг. Моменты инерции некоторых тел. Ориентировочные формулы для определения момента инерции двигателей приведены в табл. 1-4. Для якорей больших машин постоянного тока при диаметре якоря более 1,4 м (точность 8-10%), кг-м. Ов) + (1-14) где Дн и £>в - наружный и внутренний диаметры стали якоря, м; 4 -длина стали яко- J = 400/s(D„-f Сз)3 (Z)„-+ 100D* + 87.5D* Z, [0] [ 1 ] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] 0.0014 |